馬達(dá)激光聯(lián)軸器對中儀哪里買
以柔性聯(lián)軸器校準(zhǔn)為例,實時數(shù)據(jù)驗證的操作步驟通常包括:安裝與初始校準(zhǔn):將激光發(fā)射器、探測器分別固定在電機軸與泵軸上,確保與軸同心,激光束投射至探測器中心后,系統(tǒng)自動采集初始偏差數(shù)據(jù)并顯示在屏幕上。動態(tài)調(diào)整與數(shù)據(jù)監(jiān)測:根據(jù)屏幕提示調(diào)整設(shè)備地腳(如增減墊片、左右平移),過程中實時觀察徑向/軸向偏差值變化。例如HOJOLO設(shè)備會通過圖形化界面標(biāo)注調(diào)整方向,操作人員可根據(jù)實時數(shù)據(jù)逐步逼近合格范圍。鎖定后的復(fù)測驗證:擰緊設(shè)備地腳螺栓后,再次啟動旋轉(zhuǎn)測量,系統(tǒng)實時復(fù)測偏差數(shù)據(jù)。若數(shù)據(jù)穩(wěn)定在合格區(qū)間(如徑向偏差≤0.05mm),則完成校準(zhǔn);若出現(xiàn)數(shù)據(jù)波動,可通過振動、溫度模塊進(jìn)一步排查是否存在安裝松動或負(fù)載干擾。激光聯(lián)軸器對中儀校準(zhǔn)后的設(shè)備,運轉(zhuǎn)精度能提升多少?馬達(dá)激光聯(lián)軸器對中儀哪里買
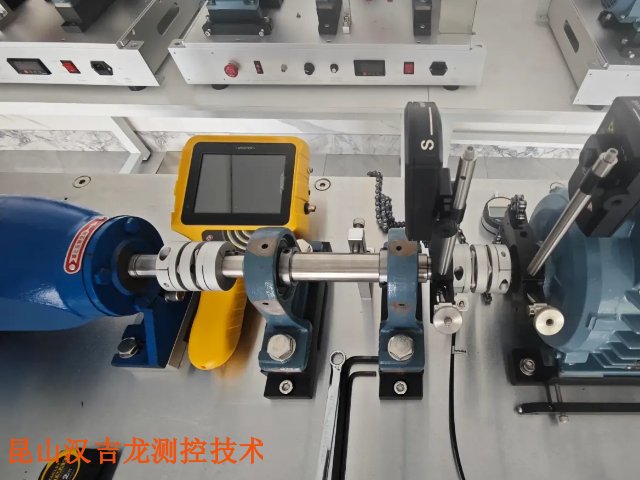
激光聯(lián)軸器對中儀
精度差異的**在于硬件配置與算法設(shè)計的層級化:激光技術(shù)方案:**型號采用雙激光束實時補償技術(shù),可抵消振動、溫度漂移導(dǎo)致的偏差;而基礎(chǔ)型號可能*配置單激光源,受光束發(fā)散角和探測器尺寸限制,長距離測量時誤差累積更明顯。傳感器與算法:AS500等**型號集成數(shù)字傾角儀和動態(tài)補償算法,能自動修正熱膨脹、軟腳誤差(如某煉油廠案例中地腳調(diào)整量精確至0.71mm);中端及以下型號可能缺乏動態(tài)補償功能,在環(huán)境波動或設(shè)備運行狀態(tài)變化時,精度穩(wěn)定性會下降。組件質(zhì)量:**型號選用高穩(wěn)定激光器(如雙頻激光干涉技術(shù))和高精度光學(xué)元件(低畸變反射鏡、透鏡),而基礎(chǔ)型號可能采用普通半導(dǎo)體激光器,波長和功率波動對精度的影響更大。耦合激光聯(lián)軸器對中儀視頻激光聯(lián)軸器對中儀針對柔性聯(lián)軸器,校準(zhǔn)精度是否適用?

數(shù)據(jù)記錄:保存完整校準(zhǔn)報告,包含冷態(tài)/熱態(tài)偏差數(shù)據(jù)、軟腳處理記錄、調(diào)整墊片厚度及振動驗證結(jié)果(HOJOLO設(shè)備支持U盤導(dǎo)出PDF報告);周期制定:根據(jù)工況確定復(fù)校周期,例如連續(xù)運行的化工泵組柔性聯(lián)軸器建議每3個月復(fù)校一次,高溫工況(>100℃)需縮短至1個月;異常標(biāo)記:若校準(zhǔn)后仍存在微小偏差(如0.03mm徑向偏差),需在報告中注明是否在柔性聯(lián)軸器補償范圍內(nèi)(如彈性體允許吸收0.05mm以內(nèi)偏差則無需進(jìn)一步調(diào)整)。關(guān)鍵注意事項與常見誤區(qū)規(guī)避避免過度調(diào)整:柔性聯(lián)軸器無需追求“零偏差”,例如某型號橡膠彈性聯(lián)軸器允許0.1mm徑向偏差,過度調(diào)整可能導(dǎo)致彈性體預(yù)壓縮變形,反而縮短壽命;熱態(tài)補償應(yīng)用:高溫工況下(如汽輪機柔性聯(lián)軸器),需啟用HOJOLO的熱膨脹補償功能,輸入彈性體熱膨脹系數(shù)(如橡膠為1.8×10??/℃),校準(zhǔn)后熱態(tài)偏差可控制在0.02mm以內(nèi);螺栓緊固順序:裝復(fù)聯(lián)軸器螺栓時需按“十字交叉法”分次擰緊,避**側(cè)受力導(dǎo)致激光測量的偏差數(shù)據(jù)失真
激光聯(lián)軸器對中儀(以HOJOLO系列為**)針對柔性聯(lián)軸器的校準(zhǔn)精度完全適用,且能通過技術(shù)適配性優(yōu)化與場景化校準(zhǔn)策略,解決柔性聯(lián)軸器因“偏差補償特性”帶來的校準(zhǔn)難題。以下從適配原理、精度控制方案及實際應(yīng)用效果展開分析:一、柔性聯(lián)軸器的校準(zhǔn)精度適配性基礎(chǔ)柔性聯(lián)軸器雖具備一定偏差補償能力(如彈性體可吸收徑向偏差、角向偏差1°-2°),但超閾值偏差仍會導(dǎo)致振動加劇、部件磨損加速。激光對中儀的精度優(yōu)勢恰好匹配其校準(zhǔn)需求:精度覆蓋偏差范圍:HOJOLOASHOOTER系列基礎(chǔ)精度達(dá)±1μm,分辨率,可精細(xì)測量柔性聯(lián)軸器允許的微小偏差(如彈簧體式柔性聯(lián)軸器允許比較大平行偏差為孔徑的3%,以孔徑100mm為例,允許偏差3mm,激光對中儀的測量精度可完全覆蓋該范圍并實現(xiàn)精細(xì)化控制);動態(tài)偏差捕捉能力:通過雙激光束+CCD探測器(1280×960像素),可實時捕捉柔性聯(lián)軸器運轉(zhuǎn)中的動態(tài)偏移(如啟動/停止時的彈性形變偏差),較傳統(tǒng)百分表法(無法消除法蘭不圓度干擾)精度提升100倍。 針對大跨度軸系校準(zhǔn),激光聯(lián)軸器對中儀可保障全段精度一致。
HOJOLO各型號在多軸系校準(zhǔn)中的精度表現(xiàn)差異,可通過具體行業(yè)案例進(jìn)一步驗證:精密制造場景(五軸加工中心):AS500在某搖籃式五軸機床校準(zhǔn)中,通過雙激光技術(shù)檢測出X軸導(dǎo)軌直線度偏差0.015mm/m,經(jīng)校準(zhǔn)后直線度提升至0.003mm/m,加工零件的平面度誤差從0.08mm降至0.01mm。其紅外熱成像與振動分析功能還能同步診斷多軸聯(lián)動時的潛在故障,例如識別出C軸軸承因?qū)χ衅顚?dǎo)致的1X頻率振動超標(biāo),提前避免加工表面劃痕缺陷。重型工業(yè)場景(多軸傳動系統(tǒng)):中端型號AS300在水泥廠窯頭電機多軸校準(zhǔn)中,采用雙模激光傳感系統(tǒng)實現(xiàn)0.005mm/m的直線度校準(zhǔn)精度,通過分段溫度補償模式適應(yīng)窯體高溫環(huán)境(溫度波動50-120℃),確保電機軸與窯體連接軸系的對中偏差始終≤0.02mm,避免因熱變形導(dǎo)致的聯(lián)軸器磨損加劇問題。基礎(chǔ)場景(常規(guī)多軸泵組):手持式基礎(chǔ)型號雖未配備雙激光補償功能,但憑借單激光源與簡化算法,仍能實現(xiàn)±0.01mm的校準(zhǔn)精度,可滿足電機-泵組多軸系的基礎(chǔ)對中需求,例如將某化工泵組的軸系徑向偏差從0.08mm調(diào)整至0.03mm以內(nèi),確保設(shè)備運行振動值符合工業(yè)標(biāo)準(zhǔn)(≤4.5mm/s)。激光聯(lián)軸器對中儀面對高振動設(shè)備,校準(zhǔn)精度仍能達(dá)標(biāo)嗎?HOJOLO激光聯(lián)軸器對中儀怎么樣
激光聯(lián)軸器對中儀的校準(zhǔn)精度有效期能維持多久?馬達(dá)激光聯(lián)軸器對中儀哪里買
激光聯(lián)軸器對中儀的動態(tài)補償技術(shù),是通過多傳感數(shù)據(jù)融合、實時算法修正、工況模型適配三大**機制,抵消設(shè)備運行中振動、溫度變化、安裝偏差等動態(tài)干擾,維持校準(zhǔn)精度的穩(wěn)定性。以HOJOLOAS500等**型號為例,其技術(shù)原理可拆解為“干擾感知-數(shù)據(jù)處理-偏差修正”的全流程閉環(huán),具體工作機制如下:一、動態(tài)干擾的多維度感知:傳感器矩陣實時捕捉異常信號動態(tài)補償?shù)那疤崾蔷?xì)識別干擾源,儀器通過集成多類型傳感器,構(gòu)建***干擾監(jiān)測體系:雙激光束對比傳感:采用635-670nm雙半導(dǎo)體激光發(fā)射器,兩束激光平行投射至CCD探測器(分辨率達(dá))。當(dāng)設(shè)備振動(如中高轉(zhuǎn)速下的軸系共振)導(dǎo)致測量單元偏移時,兩束激光的光斑偏移量會產(chǎn)生微小差異,系統(tǒng)通過計算差值剔除共性振動干擾(如支架共振引發(fā)的同步偏移),*保留軸系真實對中偏差。例如在3000rpm壓縮機校準(zhǔn)中,單激光測量可能因振動產(chǎn)生±,雙激光對比可將誤差壓縮至±。數(shù)字傾角儀實時監(jiān)測:內(nèi)置高精度傾角傳感器(精度±°),持續(xù)檢測測量單元的安裝姿態(tài)變化,主要針對兩類偏差:一是軟腳偏差(地腳螺栓松動或基礎(chǔ)沉降導(dǎo)致的軸系傾斜),當(dāng)傾角變化超過°時,系統(tǒng)自動計算傾斜角度對激光光路的影響,修正徑向偏差數(shù)據(jù)。馬達(dá)激光聯(lián)軸器對中儀哪里買
- 轉(zhuǎn)軸對中儀服務(wù)演示 2025-12-17
- 無線無線激光對中儀哪里買 2025-12-17
- 國內(nèi)聯(lián)軸器振動紅外對中儀供應(yīng)商 2025-12-17
- 經(jīng)濟型對中儀貼牌 2025-12-17
- 振動對中儀服務(wù)價格 2025-12-17
- 漢吉龍測控?zé)o線激光對中儀調(diào)試 2025-12-17
- 電機無線激光對中儀視頻 2025-12-17
- 激光鐳射主軸對準(zhǔn)儀哪家好 2025-12-17
- HOJOLO聯(lián)軸器不對中測量儀的作用 2025-12-17
- 租用無線激光對中儀 2025-12-17
- 中國臺灣插拔測試機器生產(chǎn)廠家 2025-12-17
- 徐州市博勒飛粘度計售價 2025-12-17
- 便攜式手持廢舊金屬含量能譜儀 2025-12-17
- 上海M32泄爆閥大概價格多少 2025-12-17
- 唐山金相砂帶機制造商 2025-12-17
- 福建零部件檢測硬度計廠家直銷 2025-12-17
- 教學(xué)傳感器比較價格 2025-12-17
- 陜西設(shè)備壓力傳感器 2025-12-17
- 金屬冶煉及加工機器自動化在線XRF熒光光譜儀 2025-12-17
- 徐州安全孔隙率檢測儀規(guī)格尺寸齊全 2025-12-17