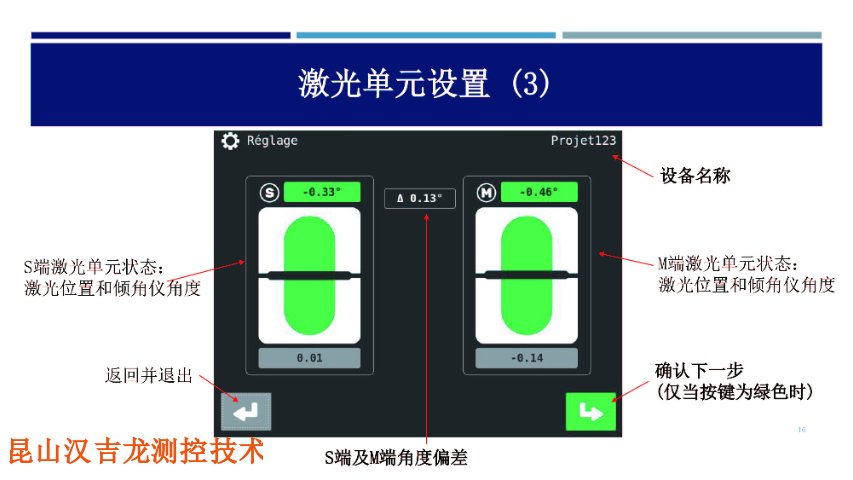
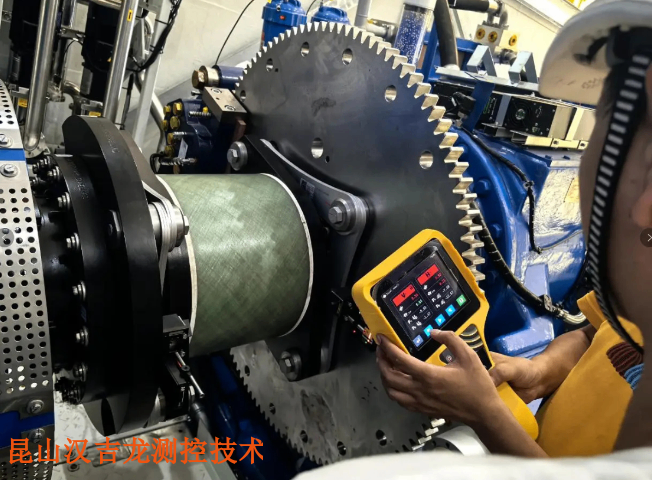
耦合激光聯軸器對中儀使用方法
激光聯軸器對中儀的校準精度存在明確的數值范圍體系,該范圍受儀器硬件性能、測量原理、行業標準及實際工況共同約束,不同精度等級的設備對應差異化的數值區間。以下結合國內外校準規范(如JJF浙1196-2023)、主流品牌參數(HOJOLO、AS500等)及工業場景驗證數據,從基礎精度、行業標準、品牌差異、工況影響四個維度展開量化解析:一、基礎精度數值范圍:按測量維度劃分激光對中儀的校準精度**分為徑向偏差精度(平行錯位)、角度偏差精度(傾斜錯位)兩類指標,不同精度等級設備的數值范圍差異***:1.高精度機型(適用于汽輪機、精密壓縮機)徑向精度:基礎測量精度可達±0.001mm,動態補償后實際應用精度穩定在±1-3μm(如HOJOLOASHOOTER系列、法國AS500)。例如在石化廠壓縮機對中案例中,ASHOOTER系列通過雙激光束動態修正熱膨脹誤差,冷態與熱態偏差控制在±2μm以內,較傳統千分表法精度提升100倍;角度精度:角度測量分辨率≤±0.001°,重復性誤差<±0.0005°。如AS500配備1280×960像素的CCD探測器,可捕捉0.0001°的微小角度偏移,滿足膜片式柔性聯軸器(允許角向偏差≤0.1°)的高精度校準需求。激光聯軸器對中儀新手操作時,能保證校準精度不降低嗎?耦合激光聯軸器對中儀使用方法
激光聯軸器對中儀
數據記錄:保存完整校準報告,包含冷態/熱態偏差數據、軟腳處理記錄、調整墊片厚度及振動驗證結果(HOJOLO設備支持U盤導出PDF報告);周期制定:根據工況確定復校周期,例如連續運行的化工泵組柔性聯軸器建議每3個月復校一次,高溫工況(>100℃)需縮短至1個月;異常標記:若校準后仍存在微小偏差(如0.03mm徑向偏差),需在報告中注明是否在柔性聯軸器補償范圍內(如彈性體允許吸收0.05mm以內偏差則無需進一步調整)。關鍵注意事項與常見誤區規避避免過度調整:柔性聯軸器無需追求“零偏差”,例如某型號橡膠彈性聯軸器允許0.1mm徑向偏差,過度調整可能導致彈性體預壓縮變形,反而縮短壽命;熱態補償應用:高溫工況下(如汽輪機柔性聯軸器),需啟用HOJOLO的熱膨脹補償功能,輸入彈性體熱膨脹系數(如橡膠為1.8×10??/℃),校準后熱態偏差可控制在0.02mm以內;螺栓緊固順序:裝復聯軸器螺栓時需按“十字交叉法”分次擰緊,避**側受力導致激光測量的偏差數據失真進口激光聯軸器對中儀特點支持多軸聯動設備同步校準,激光聯軸器對中儀提升整體運維效率。
HOJOLO通過硬件與算法的協同設計,從根源上抵消惡劣工況的精度干擾:1.激光測量系統優化低發散角激光源:采用635-670nm半導體激光器,發散角≤0.1mrad,即使在粉塵散射環境中,10m跨距內光斑直徑仍控制在1mm以內,避免探測器接收信號失真;高分辨率CCD探測器:搭載1280×960像素CCD(部分機型為30mm視場),**小識別精度達0.001mm,可捕捉軸系微小偏差,較傳統百分表(精度0.01mm)提升10倍。2.動態補償算法體系多參數融合補償:集成溫度、振動、傾角多維度傳感器數據,通過自適應算法實時修正誤差。例如在高溫高振動復合工況下,先通過熱補償修正軸系熱變形,再通過雙激光對比抵消振動干擾,**終精度偏差≤±0.005mm漢吉龍測控技術;場景自適應邏輯:針對不同設備類型自動切換補償策略——高速設備(如離心壓縮機)重點優化角向偏差補償,低速重載設備(如礦山破碎機)強化徑向振動修正,避免“一刀切”算法導致的精度損耗。
軟腳檢測(柔性聯軸器校準關鍵前置環節)柔性聯軸器的彈性補償特性易掩蓋軟腳導致的隱性偏差,需優先通過激光對中儀的軟腳測試功能消除底座形變干擾:參數設置:啟動HOJOLO設備并進入“Softfoot”模式,輸入測量參數:S(固定端激光探頭)到M(移動端探頭)的距離;S到動設備前地腳(F1)、后地腳(F2)的水平跨度;點位測量:將聯軸器轉動至12點鐘位置(正上方),調整激光發射器使光束落在接收靶中心;依次松開并重新擰緊每個地腳螺栓,記錄位移變化量(如松開螺栓時位移量>0.06mm需處理軟腳);軟腳處理:對超差地腳(如某腳位移0.07mm),通過增減不銹鋼墊片(厚度精度0.01mm)找平,重復測量直至所有地腳位移量≤0.05mm(例如HOJOLO校準某風機時,將原0.08mm軟腳偏差修正至0.02mm)。激光聯軸器對中儀的校準精度有多高?
HOJOLO不同型號的精度設計與其目標場景強綁定,進一步放大了實際應用中的精度差異:**型號(AS500)針對精密制造、能源等行業的高要求場景,需在長跨距、高振動或惡劣環境下保持穩定精度;中端型號(AS300)面向常規工業維護,平衡精度與成本;基礎型號則聚焦簡易對中需求,精度足以滿足通用設備的基礎校準,但無法應對嚴苛工況。HOJOLO激光聯軸器對中儀的型號間精度差異并非偶然,而是基于產品定位的主動設計,選擇時需結合實際工況的精度需求、環境干擾因素及預算綜合判斷。激光聯軸器對中儀的校準精度是否有具體的數值范圍參考?耦合激光聯軸器對中儀使用方法
即使在多設備交叉作業環境,激光聯軸器對中儀也能保持精確校準。耦合激光聯軸器對中儀使用方法
多維偏差精細測量基于柔性聯軸器的三維偏差特性(徑向、角向、軸向復合偏差),采用“時鐘法”完成全維度數據采集:測量點位選擇:基礎模式:轉動軸系至12點、3點、6點三個位置(共旋轉180°),每次停穩后按下測量鍵,HOJOLO設備通過雙激光束+CCD探測器(1280×960像素)捕捉偏差數據;動態模式:針對高轉速柔性聯軸器(如3000rpm以上),啟用HOJOLO的“動態捕捉”功能,實時采集運轉中彈性體的形變偏差(采樣頻率100Hz);數據計算:設備自動生成偏差報告,例如某彈性聯軸器測量結果顯示:徑向偏差0.12mm、角向偏差0.5°、軸向偏差0.08mm,系統同步標注各偏差是否超出設備允許閾值。耦合激光聯軸器對中儀使用方法
- 轉軸對中儀服務演示 2025-12-17
- 無線無線激光對中儀哪里買 2025-12-17
- 國內聯軸器振動紅外對中儀供應商 2025-12-17
- 經濟型對中儀貼牌 2025-12-17
- 漢吉龍測控無線激光對中儀調試 2025-12-17
- 電機無線激光對中儀視頻 2025-12-17
- 激光鐳射主軸對準儀哪家好 2025-12-17
- HOJOLO聯軸器不對中測量儀的作用 2025-12-17
- 歐洲激光聯軸器對中儀使用方法 2025-12-17
- 無線軸對中激光儀多少錢 2025-12-17
- 福建零部件檢測硬度計廠家直銷 2025-12-17
- 教學傳感器比較價格 2025-12-17
- 金屬冶煉及加工機器自動化在線XRF熒光光譜儀 2025-12-17
- 徐州安全孔隙率檢測儀規格尺寸齊全 2025-12-17
- 進口單相電機200W馬達 2025-12-17
- 中山智能液體分層儀公司 2025-12-17
- 珠海小功率電子負載功能 2025-12-17
- 浦東新區推薦免疫分析儀圖片 2025-12-17
- 云南水控機品牌 2025-12-17
- 蘇州本地廢氣處理設備哪家好 2025-12-17