-
 廣東360度全景攝像頭采購
廣東360度全景攝像頭采購車侶360全景影像系統與畫面分割器相結合使用,可以實現以下效果:精確的物體識別:畫面分割器可以通過將圖像分割成不同的區域,從而更準確地識別和提取出畫面中的各個物體。結合360全景影像系統,可以實現對全景畫面中的物體進行更精確的識別和分割,提高對不同...
2025-05-03 -
 四川客車多路視頻拼接系統技術解決方案
四川客車多路視頻拼接系統技術解決方案(下篇)AI360全景6路拼接2路監控實現8路視頻的技術原理,主要涉及多個高清攝像頭拍攝的視頻圖像的處理與融合。以下是對該技術原理的詳細闡述: 四、技術原理總結AI360全景6路拼接2路監控實現8路視頻的技術原理,是通過6個高清攝像頭拍攝視頻圖像,并...
2025-05-03 -
 龍門架360全景影像系統加裝
龍門架360全景影像系統加裝車侶4G360全景影像系統具備4G通信功能的意義如下:實時數據傳輸:4G通信功能可以實現高速、穩定的數據傳輸,使得360全景影像系統能夠實時傳輸全景影像數據。這可以幫助用戶在遠程位置實時監控和觀察拍攝的場景,提供及時的圖像信息和情況反饋.遠程控制和...
2025-05-03 -
 北京起重機多路視頻拼接系統方案商
北京起重機多路視頻拼接系統方案商(下篇)主動安全預警系統的5路拼接360全景影像實現,主要依賴于先進的攝像頭技術、圖像處理算法以及系統集成技術。以下是其實現過程的詳細解釋: 四、技術特點與優勢全方WEI視野:5路拼接360全景影像技術提供了全方WEI的視野覆蓋,消除了駕駛盲區,提高...
2025-05-03 -
 商用車360全景影像系統生產廠家
商用車360全景影像系統生產廠家360度全景監控系統攝像頭的安裝:本系統需要安裝四個攝像頭;前置攝像頭分為專車專門使用和通用兩種攝像頭,專車專門使用攝像頭安裝在車標上;通用外部掛攝像頭可安裝在進風柵、保險杠或其它合適位置上。左右兩側的攝像頭安裝在后視鏡上。顯示器的安裝:根據線路連接圖將線路連...
2025-05-03 -
 云南起重機多路視頻拼接系統聯系方式
云南起重機多路視頻拼接系統聯系方式(篇一)AI360全景影像集成4G網口輸出和BSD盲區預警系統實現8路視頻實時同顯的技術原理,主要涉及視頻拼接技術、4G通信技術、BSD盲區監測技術,以及系統集成與兼容性技術。以下是對這些技術原理的詳細解析: 一、視頻拼接技術攝像頭布局與采集:在車輛...
2025-05-02 -
 攪拌車360全景影像廠家
攪拌車360全景影像廠家360度全景影像是汽車行業較先進的產品,他依靠一個主機,加四個攝像頭,就可以組成一個單獨的全景系統。然后主機將四個攝像頭所拍攝的。影像經過程序的告訴運行與處理,從而達到無縫拼接的效果!現在市面上的全景大都是依靠這種方式在處理,主要區別在于壓縮以及畫面情緒度上。...
2025-05-02 -
 攪拌車360全景環視系統安裝
攪拌車360全景環視系統安裝(上篇)紅外熱像儀在車載主動安全預警系統中的應用,主要得益于其能夠探測并可視化目標物體的紅外輻射,這一特性使得紅外熱像儀在多種駕駛環境中都能發揮重要作用。以下是對其應用的詳細分析: 一、紅外熱像儀的工作原理紅外熱像儀利用紅外輻射照像原理,研究物體表面...
2025-05-02 -
 商用車360盲區偵測系統采購
商用車360盲區偵測系統采購360全景影像怎么調試左右?先把360度全景攝像頭出來,調試好;前攝像頭位置,前攝像頭采用螺釘固定方式,無需打孔;后置攝像頭位置、和前置攝像頭安裝流程;左攝像頭,安裝在后視鏡下,用電鉆鉆孔固定即可;右攝像機,同上;調試攝像頭的監控的角度,一般車體占1/5就好;...
2025-05-02 -
 安徽客車多路視頻拼接系統開發平臺
安徽客車多路視頻拼接系統開發平臺(上篇)AI360全景影像4路拼接集成BSD(盲點監測系統)、雷達、疲勞駕駛預警及熱成像,并實現8路視頻同顯的技術原理,涉及多個方面的技術集成和融合。以下是對其技術原理的詳細闡述: 一、AI360全景影像4路拼接攝像頭布局:AI360全景影像系統通常...
2025-05-02 -
 吉林疲勞駕駛預警系統技術解決方案
吉林疲勞駕駛預警系統技術解決方案(下篇)能獨LI工作,也能集成其他安全預警系統實現智慧云臺管理的疲勞駕駛預警設備,在車載行業中具有廣泛的應用前景。以下是對其應用的具體分析: 三、應用場景長途客運和貨運車輛:這些車輛通常行駛時間長、駕駛環境復雜,駕駛員容易疲勞。疲勞駕駛預警設備可以有...
2025-05-01 -
 車用360全景影像系統定制
車用360全景影像系統定制(專輯一)360全景透SHI功能在技術上主要通過以下幾個步驟實現: 一、基本原理360全景透SHI功能基于廣角效應和幾何透SHI原理,通過拍攝設備(如相機或攝像頭)捕捉多個角度的圖像,并將這些圖像拼接成一張完整的全景圖片或實時視頻流。 二、實現...
2025-05-01 -
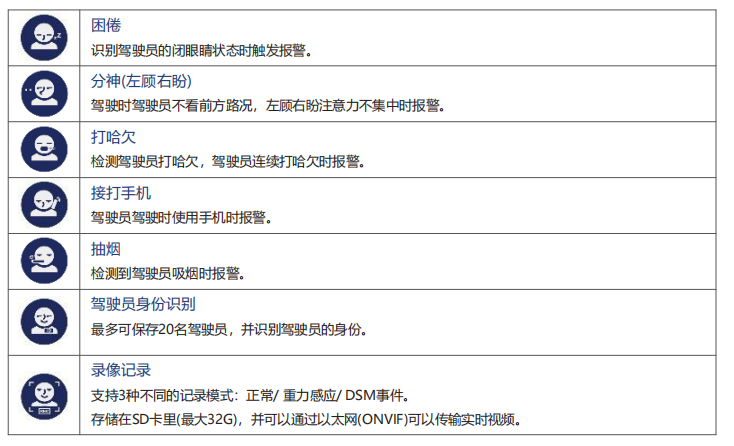
 北京司機行為檢測預警系統進度查詢
北京司機行為檢測預警系統進度查詢(下篇)疲勞駕駛預警設備在商用車上的推薦安裝位置需要滿足能夠時時刻刻監測到駕駛員面部的條件,以確保設備能夠有效地捕捉到駕駛員的疲勞狀態。以下是一些推薦的安裝位置: 在安裝疲勞駕駛預警設備時,還需要注意以下幾點:安裝角度:設備應安裝在駕駛員正前偏右30...
2025-05-01 -
 北京礦車司機行為檢測預警系統廠家
北京礦車司機行為檢測預警系統廠家疲勞駕駛預警系統融合MDVR系統實現后臺遠程監控管理方式的具體闡述一: 一、系統架構與集成系統架構設計:疲勞駕駛預警系統和MDVR系統作為DL的子系統,在融合過程中需要設計合理的系統架構,確保兩者能夠無縫對接、協同工作。系統架構應包括數據采集...
2025-05-01 -
 壓裂車360全景影像系統廠家直銷
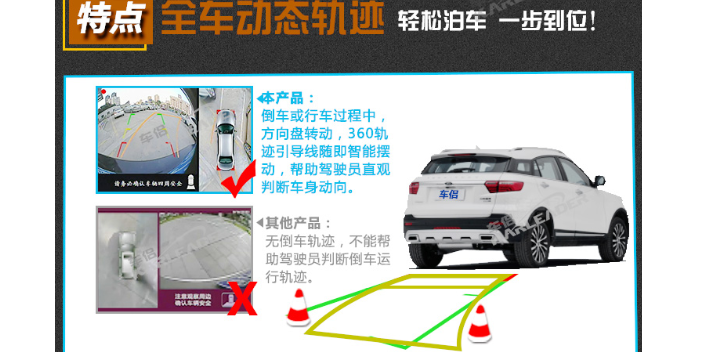
壓裂車360全景影像系統廠家直銷全景倒車影像系統在汽車周圍安裝能覆蓋車輛周邊所有視場范圍的4個廣角攝像頭,對同一時刻采集到的多路視頻影像處理成一幅車輛周邊360度的車身俯視圖,然后在中控臺的屏幕上顯示(有別于分割圖像),可徹底消滅車輛周圍的視覺盲點,它能讓駕駛員實時在車內監控車外前、后、左、...
2025-05-01 -
 車輛改裝360度全景攝像頭
車輛改裝360度全景攝像頭(中篇)車侶AI360全景影像系統憑借其強大的功能特性和靈活的定制能力,能夠滿足不同客戶在多樣化應用場景下的需求。以下是對該系統核XIN功能及定制化服務的詳細解析: 優先顯示關鍵區域畫面,縮短響應時間。商用車隊:集成ADAS功能(如車道偏離預警、前車...
2025-05-01 -
油罐車360盲區偵測系統哪個牌子好
360°全景監控系統操作方法有哪些?側視:在基本圖形模式的情況下,打左轉燈或右轉燈時,顯示屏畫面切換到左右兩畫面顯示模式,取消轉向燈,畫面又自動切換到基本畫面模式,延時15秒關閉顯示,切換至導航影音模式。側、后視:當掛倒車檔+打轉向燈時,顯示器畫面切換到三畫面...
2025-05-01 -
 重慶騰訊司機行為檢測預警系統
重慶騰訊司機行為檢測預警系統(下篇)在疲勞駕駛集成MDVR系統中,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發指令對車端進行交互控制,監控實時作業情況? 三、監控實時作業情況 1.視頻采集與傳輸:MDVR系統持續采集車內外視頻數據,并通過無線網絡將其傳輸給智慧云平臺。云平...
2025-05-01 -
 青海機車多路視頻拼接系統定制開發
青海機車多路視頻拼接系統定制開發(篇二)AI360全景影像集成4G網口輸出和BSD盲區預警系統實現8路視頻實時同顯的技術原理,主要涉及視頻拼接技術、4G通信技術、BSD盲區監測技術,以及系統集成與兼容性技術。以下是對這些技術原理的詳細解析: 4G通信技術使得系統能夠將實時視頻數據、...
2025-05-01 -
 河南疲勞駕駛預警系統
河南疲勞駕駛預警系統(篇三)DSM-7疲勞駕駛預警系統是一種重要的汽車安全輔助系統,它通過監測駕駛員的生理反應和駕駛行為來判斷駕駛員是否處于疲勞狀態,并及時發出預警,以減少因疲勞駕駛引發的交通事故。PCI盒子作為疲勞駕駛預警系統的一部分,通常用于連接外WEI設備和主機,實現數...
2025-05-01 -
 車輛360盲區偵測系統哪個牌子好
車輛360盲區偵測系統哪個牌子好已有倒車影像能加裝360全景嗎?倒車影像系統不能加裝全景攝像頭。倒車影像系統不能加裝全景攝像頭的原因:高清攝像頭拍攝的畫面越高清,意味著所拍攝得到的畫面數據越大。數據越大意味著處理器處理起來越艱難,雖然加大內存有助于處理器處理數據的速度,但也以為著處理器給車子...
2025-04-30 -
車用8路360全景影像系統哪個牌子好
車侶360全景影像系統不僅可以實時顯示行人的位置和動態變化,還可以提供更多的視覺信息,讓駕駛員對周圍環境有更四周的認知。這有助于增強駕駛員對行人存在的意識,使其更加關注和警惕周圍的行人,并避免潛在的碰撞事故.協助事故調查和證據獲取:如果發生與行人相...
2025-04-30 -
江蘇船舶多路視頻拼接系統廠家供應
(中篇)4G網口輸出8路AI360全景影像系統實現多路視頻同顯的技術原理,主要基于視頻拼接技術、4G通信技術、系統集成與兼容性技術,以及先進的圖像處理與傳輸技術。以下是對該技術原理的詳細闡述: 4G通信技術使得系統能夠將實時視頻數據、智能識別數據等傳...
2025-04-30 -
 橋梁多路視頻拼接系統廠家供應
橋梁多路視頻拼接系統廠家供應(專輯一)多路視頻拼接與多路視覺拼接的區別主要體現在處理對象和拼接方式上。前者處理的是視頻流,注重實時性和連續性;后者處理的是靜態圖像,注重圖像的質量和拼接效果。在實際應用中,應根據具體需求選擇合適的拼接技術。 一、處理對象 多路視頻拼接主要處...
2025-04-30 -
 吉林船舶多路視頻拼接系統開發商
吉林船舶多路視頻拼接系統開發商(上篇)360°全景環視融合超聲波雷達系統在現代汽車、工程車、無人機以及工業自動化等領域中發揮著重要作用。這一系統不僅提供了全方WEI的視覺監控,還結合了超聲波雷達的精確測距能力,實現了多路視頻上傳功能,極大地提升了安全性和可靠性。以下是該系統的具體應用:...
2025-04-30 -
 湖南4G通信多路視頻拼接系統開發商
湖南4G通信多路視頻拼接系統開發商(上篇)360°全景環視融合超聲波雷達系統在現代汽車、工程車、無人機以及工業自動化等領域中發揮著重要作用。這一系統不僅提供了全方WEI的視覺監控,還結合了超聲波雷達的精確測距能力,實現了多路視頻上傳功能,極大地提升了安全性和可靠性。以下是該系統的具體應用:...
2025-04-30 -
 車輛360影像系統
車輛360影像系統4G 360全景影像在礦車上的應用主要體現在提高作業安全性、效率以及管理便利性等方面。以下是對其應用的具體分析: 一、技術原理與組成 4G 360全景影像系統通過在礦車前后左右各安裝一臺超廣角、高清夜視攝像頭,實時采集車身四周的高清視頻畫面...
2025-04-30 -
 甘肅客車多路視頻拼接系統聯系方式
甘肅客車多路視頻拼接系統聯系方式(中篇)4G網口輸出8路AI360全景影像系統實現多路視頻同顯的技術原理,主要基于視頻拼接技術、4G通信技術、系統集成與兼容性技術,以及先進的圖像處理與傳輸技術。以下是對該技術原理的詳細闡述: 4G通信技術使得系統能夠將實時視頻數據、智能識別數據等傳...
2025-04-30 -
 廣東多路視頻拼接系統開發平臺
廣東多路視頻拼接系統開發平臺(下篇)8路視頻實時顯示于智能顯控終端的AI360全景影像系統,是通過一系列先進的技術和算法實現的。以下是對其工作原理的詳細解析: 智能分析技術:智能分析技術可以對生成的360度全景圖像進行進一步的處理和分析,以提取有用的信息并發出預警。例如,系統可...
2025-04-30 -
 上海AI多路視頻拼接系統方案商
上海AI多路視頻拼接系統方案商(下篇)主動安全預警系統在解決超長掛車的視覺盲區問題時,可以采取多種技術手段和策略,以下是一些具體的解決方案: 四、輔助后視鏡與廣角鏡輔助后視鏡:在掛車的標準后視鏡基礎上,增加輔助后視鏡。輔助后視鏡可以擴大駕駛員的視野范圍,減少側方盲區。廣角鏡(凸面...
2025-04-30