-
 南京智能輔助駕駛價(jià)格
南京智能輔助駕駛價(jià)格消防應(yīng)急場(chǎng)景中,智能輔助駕駛系統(tǒng)為消防車提供了動(dòng)態(tài)路徑規(guī)劃與障礙物規(guī)避能力。系統(tǒng)通過(guò)熱成像攝像頭識(shí)別火場(chǎng)周邊人員與車輛,結(jié)合交通信號(hào)優(yōu)先控制技術(shù),使出警響應(yīng)時(shí)間大幅縮短。決策模塊采用博弈論算法處理多車協(xié)同避讓場(chǎng)景,執(zhí)行層通過(guò)主動(dòng)懸架系統(tǒng)保持車身穩(wěn)定性,確保消防...
2025-12-09 -
 新鄉(xiāng)世澤無(wú)線圖數(shù)一體機(jī)應(yīng)用
新鄉(xiāng)世澤無(wú)線圖數(shù)一體機(jī)應(yīng)用無(wú)線圖數(shù)一體機(jī)基于分時(shí)雙工通信系統(tǒng)構(gòu)建,整合了動(dòng)態(tài)頻譜分配與智能圖像壓縮技術(shù)。其中心優(yōu)勢(shì)在于將視頻流與控制指令映射至獨(dú)自時(shí)隙,通過(guò)相位同步補(bǔ)償確保兩類信號(hào)嚴(yán)格對(duì)齊。例如,在消防機(jī)器人應(yīng)用中,設(shè)備可同時(shí)傳輸4K火場(chǎng)畫面與行走機(jī)構(gòu)控制指令,時(shí)延控制在80毫秒以內(nèi)。...
2025-12-09 -
 礦山機(jī)械智能輔助駕駛
礦山機(jī)械智能輔助駕駛工業(yè)物流場(chǎng)景下的智能輔助駕駛聚焦于密集人流環(huán)境的安全防護(hù)。AGV小車采用多層級(jí)安全防護(hù)機(jī)制,底層硬件具備冗余制動(dòng)回路,上層軟件實(shí)現(xiàn)多傳感器決策融合。在3C電子制造廠房?jī)?nèi),系統(tǒng)通過(guò)UWB定位標(biāo)簽實(shí)時(shí)追蹤作業(yè)人員位置,當(dāng)檢測(cè)到人員進(jìn)入危險(xiǎn)區(qū)域時(shí),0.2秒內(nèi)觸發(fā)急停...
2025-12-09 -
 徐州無(wú)軌設(shè)備智能輔助駕駛功能
徐州無(wú)軌設(shè)備智能輔助駕駛功能建筑工地環(huán)境對(duì)智能輔助駕駛系統(tǒng)提出了非結(jié)構(gòu)化道路適應(yīng)性的挑戰(zhàn)。系統(tǒng)通過(guò)視覺(jué)SLAM技術(shù)構(gòu)建臨時(shí)施工區(qū)域地圖,動(dòng)態(tài)識(shí)別塔吊、腳手架等臨時(shí)設(shè)施。決策模塊采用模糊邏輯控制算法,在泥濘、坑洼等復(fù)雜路面上規(guī)劃可通行區(qū)域,避開未凝固混凝土區(qū)域。執(zhí)行機(jī)構(gòu)通過(guò)主動(dòng)后輪轉(zhuǎn)向技術(shù)...
2025-12-08 -
河南港口碼頭智能輔助駕駛功能
港口碼頭場(chǎng)景對(duì)智能輔助駕駛系統(tǒng)提出特殊要求。集裝箱卡車搭載該系統(tǒng)后,可實(shí)現(xiàn)從堆場(chǎng)到碼頭的全自動(dòng)運(yùn)輸。系統(tǒng)通過(guò)高精度地圖與激光雷達(dá)定位確保車輛在固定路線上的精確行駛,同時(shí)通過(guò)V2X通信接收港口調(diào)度系統(tǒng)的實(shí)時(shí)指令。在裝卸作業(yè)環(huán)節(jié),車輛與自動(dòng)化起重機(jī)協(xié)同工作,通過(guò)位...
2025-12-08 -
 長(zhǎng)沙世澤無(wú)線圖數(shù)一體機(jī)應(yīng)用
長(zhǎng)沙世澤無(wú)線圖數(shù)一體機(jī)應(yīng)用無(wú)線圖數(shù)一體機(jī)支持?jǐn)?shù)據(jù)、語(yǔ)音、視頻的并發(fā)傳輸,通過(guò)QoS機(jī)制為不同業(yè)務(wù)分配優(yōu)先級(jí)。在應(yīng)急指揮場(chǎng)景中,設(shè)備可優(yōu)先保障生命體征監(jiān)測(cè)數(shù)據(jù)的傳輸,其次傳遞現(xiàn)場(chǎng)語(yǔ)音通話,然后加載高清視頻流。例如,當(dāng)消防員進(jìn)入濃煙環(huán)境時(shí),無(wú)線圖數(shù)一體機(jī)將熱成像畫面優(yōu)先級(jí)設(shè)為然后高,確保指...
2025-12-08 -
 南京港口碼頭智能輔助駕駛
南京港口碼頭智能輔助駕駛港口作為全球貿(mào)易樞紐,對(duì)智能輔助駕駛的需求集中于高頻次、較強(qiáng)度的作業(yè)協(xié)同。集裝箱卡車通過(guò)V2X通信模塊與碼頭操作系統(tǒng)深度融合,實(shí)時(shí)獲取堆場(chǎng)起重機(jī)狀態(tài)與運(yùn)輸任務(wù)指令,決策層運(yùn)用混合整數(shù)規(guī)劃算法,統(tǒng)籌多車協(xié)同調(diào)度與單車路徑優(yōu)化,生成包含加速度、轉(zhuǎn)向角的多模態(tài)決策空...
2025-12-08 -
 湖北智能輔助駕駛供應(yīng)
湖北智能輔助駕駛供應(yīng)消防應(yīng)急場(chǎng)景中,智能輔助駕駛系統(tǒng)為消防車提供了動(dòng)態(tài)路徑規(guī)劃與障礙物規(guī)避能力。系統(tǒng)通過(guò)熱成像攝像頭識(shí)別火場(chǎng)周邊人員與車輛,結(jié)合交通信號(hào)優(yōu)先控制技術(shù),使出警響應(yīng)時(shí)間大幅縮短。決策模塊采用博弈論算法處理多車協(xié)同避讓場(chǎng)景,執(zhí)行層通過(guò)主動(dòng)懸架系統(tǒng)保持車身穩(wěn)定性,確保消防...
2025-12-08 -
成都智能輔助駕駛功能
市政環(huán)衛(wèi)領(lǐng)域?qū)χ悄茌o助駕駛的需求聚焦于復(fù)雜城市道路的適應(yīng)能力與作業(yè)效率提升。洗掃車搭載的系統(tǒng)通過(guò)多目視覺(jué)識(shí)別道路標(biāo)識(shí)線,結(jié)合高精度地圖實(shí)現(xiàn)厘米級(jí)貼邊作業(yè),清掃覆蓋率大幅提升。針對(duì)早晚高峰交通流,決策模塊運(yùn)用社會(huì)車輛行為預(yù)測(cè)模型,提前預(yù)判切入車輛軌跡,自主調(diào)整作...
2025-12-08 -
湖南礦山機(jī)械智能輔助駕駛分類
林業(yè)作業(yè)場(chǎng)景對(duì)智能輔助駕駛系統(tǒng)提出了特殊的環(huán)境適應(yīng)性要求。集材車搭載的系統(tǒng)通過(guò)RTK-GNSS與IMU組合導(dǎo)航,在坡度環(huán)境下實(shí)現(xiàn)穩(wěn)定定位。決策模塊基于數(shù)字高程模型規(guī)劃較優(yōu)運(yùn)輸路徑,通過(guò)模型預(yù)測(cè)控制算法處理側(cè)傾風(fēng)險(xiǎn)。執(zhí)行機(jī)構(gòu)采用電液耦合驅(qū)動(dòng)技術(shù),使車輛在松軟林地...
2025-12-08 -
廣東無(wú)軌設(shè)備智能輔助駕駛
市政環(huán)衛(wèi)領(lǐng)域?qū)χ悄茌o助駕駛的需求聚焦于復(fù)雜城市道路的適應(yīng)能力與作業(yè)效率提升。洗掃車搭載的系統(tǒng)通過(guò)多目視覺(jué)識(shí)別道路標(biāo)識(shí)線,結(jié)合高精度地圖實(shí)現(xiàn)厘米級(jí)貼邊作業(yè),清掃覆蓋率大幅提升。針對(duì)早晚高峰交通流,決策模塊運(yùn)用社會(huì)車輛行為預(yù)測(cè)模型,提前預(yù)判切入車輛軌跡,自主調(diào)整作...
2025-12-08 -
 10公里mesh自組網(wǎng)功能
10公里mesh自組網(wǎng)功能物流倉(cāng)儲(chǔ)行業(yè)利用Mesh自組網(wǎng)優(yōu)化了貨物追蹤與設(shè)備協(xié)同。部署于貨架、叉車及手持終端的節(jié)點(diǎn)形成室內(nèi)高精度定位網(wǎng)絡(luò),通過(guò)UWB與Mesh技術(shù)融合實(shí)現(xiàn)了亞米級(jí)定位精度。節(jié)點(diǎn)間通過(guò)多跳傳輸擴(kuò)展覆蓋范圍,避免了倉(cāng)庫(kù)金屬貨架對(duì)信號(hào)的遮擋。AGV小車作為移動(dòng)節(jié)點(diǎn)加入網(wǎng)絡(luò),接...
2025-12-08 -
 化工mesh自組網(wǎng)品牌
化工mesh自組網(wǎng)品牌Mesh自組網(wǎng)設(shè)備提供多樣化的物理接口,以適應(yīng)不同工業(yè)設(shè)備的連接需求。TTL電平接口支持低功耗傳感器節(jié)點(diǎn)的直接接入,RS232接口兼容傳統(tǒng)工業(yè)控制器,USB接口便于與便攜式終端快速配對(duì),而單百兆網(wǎng)口則滿足高清攝像頭或數(shù)據(jù)記錄儀的高速傳輸需求。例如,在機(jī)器人協(xié)同...
2025-12-08 -
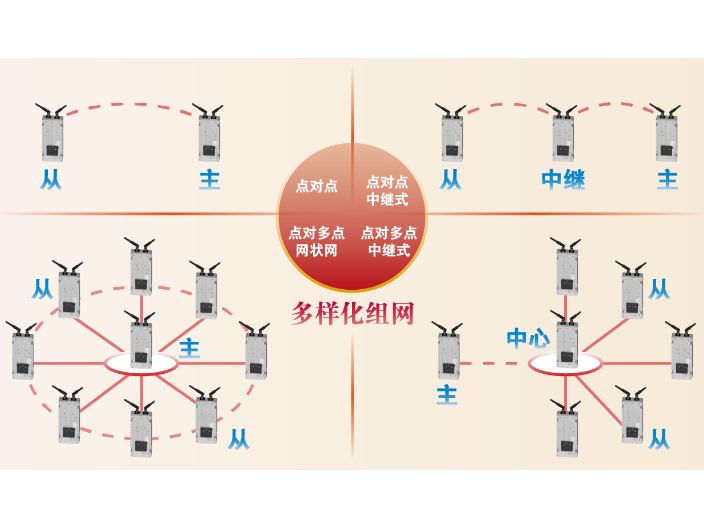
 點(diǎn)對(duì)點(diǎn)mesh自組網(wǎng)應(yīng)用
點(diǎn)對(duì)點(diǎn)mesh自組網(wǎng)應(yīng)用Mesh自組網(wǎng)通過(guò)整合OFDM與MIMO技術(shù),卓著提升了無(wú)線通信的抗干擾能力和數(shù)據(jù)傳輸效率。OFDM技術(shù)將信道劃分為多個(gè)正交子載波,有效抵抗多徑效應(yīng)引起的符號(hào)間干擾,而MIMO技術(shù)利用多天線實(shí)現(xiàn)空間分集與復(fù)用,結(jié)合QPSK、QAM16及QAM64調(diào)制方式,可根...
2025-12-08 -
 環(huán)衛(wèi)車mesh自組網(wǎng)設(shè)備
環(huán)衛(wèi)車mesh自組網(wǎng)設(shè)備特殊領(lǐng)域?qū)νㄐ啪W(wǎng)絡(luò)的抗摧毀與機(jī)動(dòng)性要求極高,Mesh自組網(wǎng)成為戰(zhàn)術(shù)通信的重要選擇。單兵終端、裝甲車輛及無(wú)人機(jī)可組建動(dòng)態(tài)自組織網(wǎng)絡(luò),采用跳頻擴(kuò)頻技術(shù)抵御敵方干擾。節(jié)點(diǎn)支持多路徑傳輸,當(dāng)主鏈路受阻時(shí)自動(dòng)切換至備用路徑,確保指揮指令的連續(xù)性。在野外演習(xí)中,Mesh網(wǎng)...
2025-12-08 -
 公路mesh自組網(wǎng)價(jià)錢
公路mesh自組網(wǎng)價(jià)錢Mesh自組網(wǎng)為偏遠(yuǎn)區(qū)域環(huán)境監(jiān)測(cè)提供可靠解決方案。部署于森林、沙漠或極地的節(jié)點(diǎn)通過(guò)太陽(yáng)能供電,結(jié)合低功耗設(shè)計(jì)延長(zhǎng)工作周期。網(wǎng)絡(luò)采用COFDM技術(shù)抵抗多徑干擾,確保氣象參數(shù)、水文數(shù)據(jù)及生物活動(dòng)信號(hào)穩(wěn)定傳輸。在野生動(dòng)物保護(hù)場(chǎng)景中,Mesh節(jié)點(diǎn)可接收動(dòng)物攜帶的定位標(biāo)...
2025-12-08 -
 隧道m(xù)esh自組網(wǎng)企業(yè)
隧道m(xù)esh自組網(wǎng)企業(yè)物流倉(cāng)儲(chǔ)行業(yè)利用Mesh自組網(wǎng)優(yōu)化了貨物追蹤與設(shè)備協(xié)同。部署于貨架、叉車及手持終端的節(jié)點(diǎn)形成室內(nèi)高精度定位網(wǎng)絡(luò),通過(guò)UWB與Mesh技術(shù)融合實(shí)現(xiàn)了亞米級(jí)定位精度。節(jié)點(diǎn)間通過(guò)多跳傳輸擴(kuò)展覆蓋范圍,避免了倉(cāng)庫(kù)金屬貨架對(duì)信號(hào)的遮擋。AGV小車作為移動(dòng)節(jié)點(diǎn)加入網(wǎng)絡(luò),接...
2025-12-08 -
 5000米mesh自組網(wǎng)通訊
5000米mesh自組網(wǎng)通訊海洋監(jiān)測(cè)領(lǐng)域面臨通信距離遠(yuǎn)、節(jié)點(diǎn)部署分散的挑戰(zhàn),Mesh自組網(wǎng)通過(guò)多跳中繼技術(shù)突破傳統(tǒng)無(wú)線通信的限制。部署于浮標(biāo)、無(wú)人艇或潛航器的節(jié)點(diǎn)形成海上動(dòng)態(tài)網(wǎng)絡(luò),實(shí)時(shí)傳輸水溫、鹽度、洋流等海洋參數(shù)。節(jié)點(diǎn)采用長(zhǎng)距低功耗通信協(xié)議,結(jié)合能量采集技術(shù)延長(zhǎng)續(xù)航時(shí)間。在跨海島通信場(chǎng)...
2025-12-08 -
5Gmesh自組網(wǎng)功能
Mesh自組網(wǎng)是一種基于動(dòng)態(tài)路由協(xié)議構(gòu)建的分布式無(wú)線通信網(wǎng)絡(luò),其中心優(yōu)勢(shì)在于無(wú)需依賴固定基礎(chǔ)設(shè)施即可實(shí)現(xiàn)節(jié)點(diǎn)間的自動(dòng)組網(wǎng)與數(shù)據(jù)傳輸。該網(wǎng)絡(luò)采用OFDM與MIMO技術(shù)結(jié)合的設(shè)計(jì),通過(guò)多天線配置(2T2R)提升信號(hào)傳輸?shù)姆€(wěn)定性和覆蓋范圍。在工業(yè)環(huán)境中,Mesh自組...
2025-12-08 -
 雙梁起重機(jī)mesh自組網(wǎng)包括
雙梁起重機(jī)mesh自組網(wǎng)包括海事演練場(chǎng)景對(duì)通信網(wǎng)絡(luò)的覆蓋范圍與抗干擾能力要求較高,Mesh自組網(wǎng)成為海上動(dòng)態(tài)組網(wǎng)的重要選擇。部署于艦船、浮標(biāo)及無(wú)人艇的節(jié)點(diǎn)形成多層網(wǎng)絡(luò)架構(gòu),實(shí)現(xiàn)跨海域的數(shù)據(jù)傳輸與指揮調(diào)度。節(jié)點(diǎn)采用COFDM技術(shù)抵御多徑干擾,并結(jié)合MIMO技術(shù)提升數(shù)據(jù)吞吐量。在遠(yuǎn)距離通信場(chǎng)...
2025-12-08 -
4Gmesh自組網(wǎng)電臺(tái)
能源行業(yè)利用Mesh自組網(wǎng)構(gòu)建智能電網(wǎng)通信基礎(chǔ)設(shè)施。部署于變電站、輸電線路及分布式電源的節(jié)點(diǎn)形成自組織監(jiān)測(cè)網(wǎng)絡(luò),實(shí)時(shí)傳輸設(shè)備狀態(tài)、電能質(zhì)量及故障定位信息。節(jié)點(diǎn)采用電力線載波與無(wú)線Mesh混合組網(wǎng)方式,提升網(wǎng)絡(luò)覆蓋深度。在偏遠(yuǎn)山區(qū)輸電線路監(jiān)測(cè)中,無(wú)人機(jī)搭載Mes...
2025-12-08 -
消防m(xù)esh自組網(wǎng)應(yīng)用
特殊領(lǐng)域采用Mesh自組網(wǎng)構(gòu)建戰(zhàn)術(shù)通信網(wǎng)絡(luò)。單兵終端、裝甲車輛及無(wú)人機(jī)通過(guò)分布式路由協(xié)議自動(dòng)建立加密鏈路,支持IP化數(shù)據(jù)傳輸及語(yǔ)音指揮。在復(fù)雜電磁環(huán)境下,節(jié)點(diǎn)通過(guò)認(rèn)知無(wú)線電技術(shù)自動(dòng)選擇可用頻段,并利用波束成形技術(shù)提升信號(hào)覆蓋范圍。即使部分節(jié)點(diǎn)被摧毀,剩余節(jié)點(diǎn)仍...
2025-12-08 -
 淬火加熱爐mesh自組網(wǎng)更新
淬火加熱爐mesh自組網(wǎng)更新智慧城市建設(shè)中,Mesh自組網(wǎng)為城市基礎(chǔ)設(shè)施監(jiān)控提供靈活解決方案。部署于路燈、交通信號(hào)燈或環(huán)境監(jiān)測(cè)站的節(jié)點(diǎn)形成城市級(jí)覆蓋網(wǎng)絡(luò),實(shí)時(shí)傳輸設(shè)備運(yùn)行狀態(tài)及環(huán)境參數(shù)。在交通管理場(chǎng)景中,車載Mesh節(jié)點(diǎn)與路側(cè)單元協(xié)同,構(gòu)建車路協(xié)同通信網(wǎng)絡(luò),實(shí)現(xiàn)車輛間距預(yù)警與信號(hào)燈優(yōu)化調(diào)...
2025-12-08 -
鏈臂鋸mesh自組網(wǎng)廠家
公共安全領(lǐng)域需要應(yīng)對(duì)突發(fā)事件的快速響應(yīng)能力,Mesh自組網(wǎng)通過(guò)便攜式部署提升應(yīng)急通信效率。在大型活動(dòng)安保中,安保人員攜帶的Mesh節(jié)點(diǎn)可快速構(gòu)建覆蓋現(xiàn)場(chǎng)的高帶寬網(wǎng)絡(luò),支持人臉識(shí)別數(shù)據(jù)與監(jiān)控視頻的實(shí)時(shí)回傳。節(jié)點(diǎn)采用智能天線技術(shù)提升抗多徑干擾能力,并通過(guò)負(fù)載均衡機(jī)...
2025-12-08 -
鋼鐵mesh自組網(wǎng)好不好
特殊領(lǐng)域?qū)νㄐ啪W(wǎng)絡(luò)的抗摧毀與機(jī)動(dòng)性要求極高,Mesh自組網(wǎng)成為戰(zhàn)術(shù)通信的重要選擇。單兵終端、裝甲車輛及無(wú)人機(jī)可組建動(dòng)態(tài)自組織網(wǎng)絡(luò),采用跳頻擴(kuò)頻技術(shù)抵御敵方干擾。節(jié)點(diǎn)支持多路徑傳輸,當(dāng)主鏈路受阻時(shí)自動(dòng)切換至備用路徑,確保指揮指令的連續(xù)性。在野外演習(xí)中,Mesh網(wǎng)...
2025-12-08 -
UDPmesh自組網(wǎng)模塊
農(nóng)業(yè)物聯(lián)網(wǎng)需要覆蓋廣闊農(nóng)田區(qū)域,Mesh自組網(wǎng)通過(guò)彈性組網(wǎng)實(shí)現(xiàn)精確化管理。在大型農(nóng)場(chǎng)中,部署于田間的節(jié)點(diǎn)形成自愈合網(wǎng)絡(luò),實(shí)時(shí)采集土壤墑情、作物長(zhǎng)勢(shì)及氣象數(shù)據(jù)。節(jié)點(diǎn)采用跳頻擴(kuò)頻技術(shù)抵御農(nóng)業(yè)機(jī)械的電磁干擾,而MIMO天線則提升數(shù)據(jù)傳輸?shù)姆€(wěn)定性。無(wú)人機(jī)作為移動(dòng)節(jié)點(diǎn)加...
2025-12-08 -
雙梁起重機(jī)mesh自組網(wǎng)多少錢
物流倉(cāng)儲(chǔ)行業(yè)利用Mesh自組網(wǎng)實(shí)現(xiàn)貨物追蹤與設(shè)備協(xié)同。部署于貨架、叉車及手持終端的節(jié)點(diǎn)形成室內(nèi)高精度定位網(wǎng)絡(luò),通過(guò)UWB與Mesh技術(shù)融合實(shí)現(xiàn)亞米級(jí)定位精度。節(jié)點(diǎn)間通過(guò)多跳傳輸擴(kuò)展覆蓋范圍,避免倉(cāng)庫(kù)金屬貨架對(duì)信號(hào)的遮擋。AGV小車作為移動(dòng)節(jié)點(diǎn)加入網(wǎng)絡(luò),接收調(diào)度...
2025-12-08 -
 歐式起重機(jī)mesh自組網(wǎng)價(jià)格
歐式起重機(jī)mesh自組網(wǎng)價(jià)格Mesh自組網(wǎng)為偏遠(yuǎn)區(qū)域環(huán)境監(jiān)測(cè)提供可靠解決方案。部署于森林、沙漠或極地的節(jié)點(diǎn)通過(guò)太陽(yáng)能供電,結(jié)合低功耗設(shè)計(jì)延長(zhǎng)工作周期。網(wǎng)絡(luò)采用COFDM技術(shù)抵抗多徑干擾,確保氣象參數(shù)、水文數(shù)據(jù)及生物活動(dòng)信號(hào)穩(wěn)定傳輸。在野生動(dòng)物保護(hù)場(chǎng)景中,Mesh節(jié)點(diǎn)可接收動(dòng)物攜帶的定位標(biāo)...
2025-12-07 -
 杭州礦山機(jī)械智能輔助駕駛價(jià)格
杭州礦山機(jī)械智能輔助駕駛價(jià)格智能輔助駕駛在礦山運(yùn)輸領(lǐng)域?qū)崿F(xiàn)作業(yè)模式革新。無(wú)軌膠輪車搭載的輔助駕駛系統(tǒng),通過(guò)V2X通信與調(diào)度中心實(shí)時(shí)同步運(yùn)輸任務(wù),動(dòng)態(tài)規(guī)劃裝載區(qū)-卸料點(diǎn)的比較優(yōu)路徑。在年產(chǎn)能千萬(wàn)噸級(jí)煤礦中,系統(tǒng)使車輛周轉(zhuǎn)效率提升30%,燃油消耗下降18%。針對(duì)井下粉塵環(huán)境,開發(fā)多模態(tài)感知融...
2025-12-07 -
 北斗mesh自組網(wǎng)廠商
北斗mesh自組網(wǎng)廠商物流倉(cāng)儲(chǔ)行業(yè)利用Mesh自組網(wǎng)優(yōu)化了貨物追蹤與設(shè)備協(xié)同。部署于貨架、叉車及手持終端的節(jié)點(diǎn)形成室內(nèi)高精度定位網(wǎng)絡(luò),通過(guò)UWB與Mesh技術(shù)融合實(shí)現(xiàn)了亞米級(jí)定位精度。節(jié)點(diǎn)間通過(guò)多跳傳輸擴(kuò)展覆蓋范圍,避免了倉(cāng)庫(kù)金屬貨架對(duì)信號(hào)的遮擋。AGV小車作為移動(dòng)節(jié)點(diǎn)加入網(wǎng)絡(luò),接...
2025-12-07