-
 江蘇余煤清掃清車機直銷
江蘇余煤清掃清車機直銷車廂智能清掃機器人的出現,無疑是火電廠物料清掃領域的一次重大變革。它以安全、環保、智能、高效的優勢,為火電廠的可持續發展注入了強大動力。在未來,隨著科技的不斷進步和創新,相信車廂智能清掃機器人將在火電廠得到更廣泛的應用,進一步提升火電廠的生產效率和管理水平。車...
2025-10-28 -
 河北火車余煤清掃清車機廠家
河北火車余煤清掃清車機廠家產品系統設計嚴格遵循開放性原則,這一原則對于產品在復雜多變的工業環境中高效運行至關重要。就拿控制系統來說,它采用開放的網絡體系結構,嚴格契合 ISO 的有關通信標準。這一設計理念帶來了諸多優勢,一方面,極大地方便了系統擴充。當企業業務發展、規模擴大,需要增加新...
2025-10-28 -
 湖北敞車清掃清車機廠家
湖北敞車清掃清車機廠家產品設計與交付過程中,我們始終堅定不移地遵循系統完善性原則。在硬件方面,從處理器到各類傳感器、執行器,每一個組件都經過精心篩選與嚴格測試,確保無任何功能缺失或性能短板,各硬件之間緊密協作,構建起穩定運行的物理基礎。軟件層面,自主研發的控制軟件與各類適配的應用軟...
2025-10-28 -
 陜西集裝箱清掃清車機直銷
陜西集裝箱清掃清車機直銷負壓清掃系統是車廂智能清掃機器人的重要組成部分,主要由盤刷、雙螺旋毛刷和滾刷構成,并且這些組件都安裝在能夠實現升降和平移操作的升降系統上。在清掃過程中,前盤刷將煤料甩向靠近吸料口的位置,隨后通過吸料口將物料吸入緩沖罐中進行處理。該系統設計有多種適應性和保護機制...
2025-10-28 -
 遼寧火車余煤清掃清車機服務
遼寧火車余煤清掃清車機服務不僅如此,車廂智能清掃機器人還具備24小時連續作業的能力。它就像一個不知疲倦的工人,只要有足夠的能源供應,就能一直穩定地工作,不受時間限制。這一特性使得火電廠在面對大量車廂需要清掃的情況時,不再需要擔心人力不足或工作時間限制的問題。無論是烈日炎炎的白天,還是寂...
2025-10-28 -
福建卸煤清煤清車機哪家好
在操作領域,車廂智能清掃機器人充分展現了其高度的智能化特性。機器人配備了一套人性化的人機交互界面,使操作人員能夠在控制室內,通過簡單的操作手柄或電腦界面,實現一鍵式的便捷操作。這種便捷的操作模式,極大地減輕了操作人員的工作負擔,提升了操作的準確度和作業效率。操...
2025-10-28 -
 廣東負壓清掃清車機廠家
廣東負壓清掃清車機廠家在實際應用中,車廂智能清掃機器人的高效性得到了充分的體現。某火電廠在使用了清掃機器人后,原本每天需要花費大量時間和人力進行車廂清掃,現在只需要安排少量的工作人員對機器人進行監控和維護,就能輕松完成清掃任務。而且,由于機器人的清掃效率高,能夠快速地完成車廂清掃,...
2025-10-28 -
福建凍煤清掃清車機哪家好
設備采用多物料屬性條件下的多參數比較好匹配技術,實現了清掃作業效率與效果的雙重優化。該技術能夠智能識別并適應不同物料(煤、塊礦、鐵精粉、球團等)的特性,自動調整刷盤的工作狀態,包括刷盤角度、轉速及預變形程度,同時精確調控刷盤分布、負壓參數及行進速度等關鍵要素。...
2025-10-28 -
 陜西余煤清掃清車機哪家好
陜西余煤清掃清車機哪家好設備采用多物料屬性條件下的多參數比較好匹配技術,實現了清掃作業效率與效果的雙重優化。該技術能夠智能識別并適應不同物料(煤、塊礦、鐵精粉、球團等)的特性,自動調整刷盤的工作狀態,包括刷盤角度、轉速及預變形程度,同時精確調控刷盤分布、負壓參數及行進速度等關鍵要素。...
2025-10-28 -
遼寧負壓清掃清車機銷售
車廂智能清掃機器人的出現,無疑是火電廠物料清掃領域的一次重大變革。它以安全、環保、智能、高效的優勢,為火電廠的可持續發展注入了強大動力。在未來,隨著科技的不斷進步和創新,相信車廂智能清掃機器人將在火電廠得到更廣泛的應用,進一步提升火電廠的生產效率和管理水平。車...
2025-10-28 -
 山西不開車門清掃清車機哪家好
山西不開車門清掃清車機哪家好寶武中南鋼鐵項目致力于優化生產流程,消除“3D崗位”。為此,寶武集團攜手匯博機器人,在中南鋼鐵項目原有卸車線軌道的基礎上,巧妙地在4號和5號卸車機之間增設了一套車廂智能清掃機器人。該機器人設備自重達22噸,充分利用了2號卸車線的基礎條件。投入應用后,原本需要6...
2025-10-28 -
安徽余煤清掃清車機多少錢
設備可實現智能無人化操作,通過車廂位置自識別,能夠自主且準確地識別車廂位置。通過遠距離激光測距傳感器與近距離超聲傳感器的精密配合,它能夠實現對車廂輪廓的高精度識別,確保清掃過程中的精細走位。同時,設備采用了先進的自主平滑運動控制技術,并結合Adaptiveco...
2025-10-27 -
山東集裝箱余煤清掃清車機廠家
產品設計與交付過程中,我們始終堅定不移地遵循系統完善性原則。在硬件方面,從處理器到各類傳感器、執行器,每一個組件都經過精心篩選與嚴格測試,確保無任何功能缺失或性能短板,各硬件之間緊密協作,構建起穩定運行的物理基礎。軟件層面,自主研發的控制軟件與各類適配的應用軟...
2025-10-27 -
江西不開車門清掃清車機多少錢一臺
智能清車機器人產品特點包括:車廂位置自識別:遠距離激光配合近距離超聲,實現對車廂輪廓的精確識別定位;清掃更干凈:自動物料聚攏結構設計,配合超負壓風機泵,清掃更干凈更環保;車廂清掃無死角:包圍式柱刷、盤刷保證清掃機構能夠接觸到車廂各個角落;自清潔管道設計:自研吸...
2025-10-27 -
西藏余煤清掃清車機直銷
技術指標:清理物料種類:干煤、濕粘煤(褐煤、煙煤[焦煤/肥煤])敞車車廂類型:國鐵常見敞車型號(C60、C62、C64、C70、C70E、C70EH、C70EH-A)清車范圍:能清理車廂內底部、車廂四壁及邊沿的余料清車能力:日清理200節車廂以上清車效率:每節...
2025-10-27 -
遼寧卸煤清煤清車機報價
在操作領域,車廂智能清掃機器人充分展現了其高度的智能化特性。機器人配備了一套人性化的人機交互界面,使操作人員能夠在控制室內,通過簡單的操作手柄或電腦界面,實現一鍵式的便捷操作。這種便捷的操作模式,極大地減輕了操作人員的工作負擔,提升了操作的準確度和作業效率。操...
2025-10-27 -
 上海核建開坡口自動化核建智能工廠數字化改造
上海核建開坡口自動化核建智能工廠數字化改造核建領域對設計和制造精度要求極高,任何微小誤差都可能引發嚴重后果。核設施部件需在高溫、高壓、強輻射環境下長期穩定運行,設計階段需精確計算部件尺寸、形狀和材料性能,制造過程則需高精度加工設備和技術。傳統方法難以滿足這些要求,易導致部件性能不達標,影響核設施的安全...
2025-10-27 -
廣東敞車清掃清車機廠家
在大宗散裝物料運輸翻卸的日常運作中,火車車廂余料清掃扮演著至關重要的角色。然而,以往這項工作主要依賴人工完成,工人們手持鐵鍬和掃把,進入車廂內部逐一清掃殘留物料。這種傳統的人工清掃方式,不僅勞動強度大,而且在安全、環保、效率和智能化等方面存在諸多不足。例如,清...
2025-10-27 -
吉林負壓清掃清車機報價
技術指標:清理物料種類:干煤、濕粘煤(褐煤、煙煤[焦煤/肥煤])敞車車廂類型:國鐵常見敞車型號(C60、C62、C64、C70、C70E、C70EH、C70EH-A)清車范圍:能清理車廂內底部、車廂四壁及邊沿的余料清車能力:日清理200節車廂以上清車效率:每節...
2025-10-27 -
天津集裝箱清掃清車機哪家好
車廂智能清掃機器人擁有強大的自適應能力,能夠自動適應多種常見的車廂型號,如C60、C62、C64、C70、C70E、C70EH、C70E-A等。無論面對何種型號的車廂,機器人都能迅速識別,并根據車廂的尺寸和結構特點,自動調節清掃器的寬度和高度。當遇到不平整的車...
2025-10-27 -
河北核建開坡口自動化核建智能工廠改造廠家
匯博智能工廠利用先進的數字孿生技術平臺,構建一個與現實工廠完全對應的虛擬模型。這一虛擬模型能夠實時反映工廠的生產狀態、設備運行情況以及物流流動等各個方面,實現對工廠的實時監控和管理。通過全流程的數字化覆蓋,匯博智能工廠不僅提高了生產效率,還為企業提供了強大的數...
2025-10-27 -
云南翻車機無人值守系統清車機銷售
可拓展性原則是保障系統長期穩定運行并適應工廠發展變化的關鍵。在現代化工業生產中,工廠的擴建與改造是常見需求,為確保智能清車機的控制系統能同步滿足擴容要求,我們賦予系統靈活的擴展能力。硬件方面,選用模塊化、標準化的設計,各組件接口通用,可輕松增添設備,如增加傳感...
2025-10-27 -
河南卸煤清煤清車機哪家好
產品在智能無人化操作的基礎上,還配備了先進的視頻監控系統,就像給機器人安裝了一雙敏銳的“眼睛”。通過這套系統,操作人員可以通過監控系統,實時查看車廂內的清掃情況,對清掃過程進行監控。一旦發現清掃過程中出現問題,如清掃不徹底、設備故障等,操作人員可以及時采取措施...
2025-10-27 -
天津余煤清掃清車機廠家
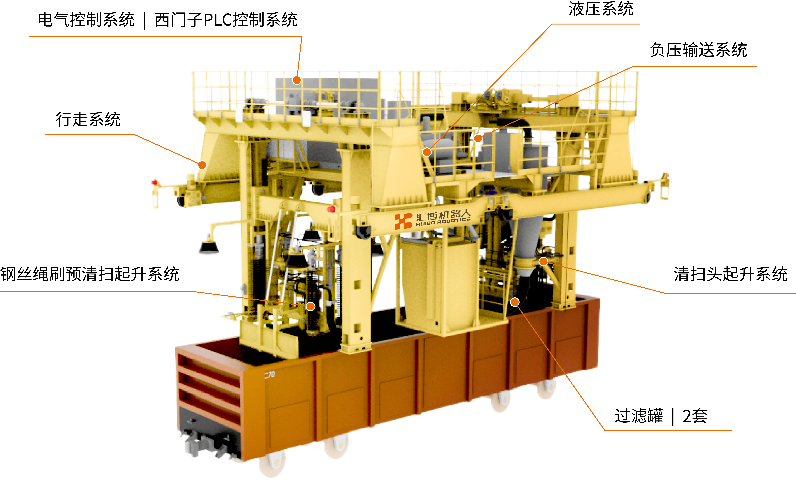
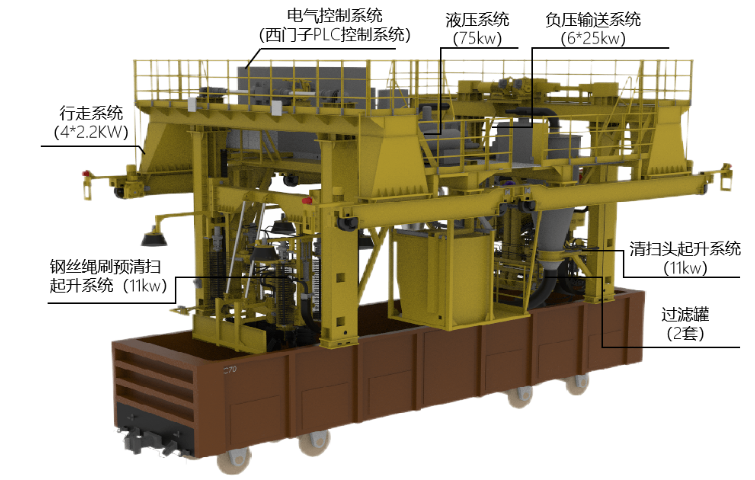
智能清車機器人由以下8大系統構成:包括鋼結構大車系統(形式:門式、半門式和橋式;驅動:設備沿鐵道方向行走,主要是鐵軌),清掃器系統(預清理:鋼絲繩刷;清掃器:柱刷+盤刷+罐體及其他組件),負壓系統(風機+除塵罐+儲存罐+負壓輸送管道),液壓系統(主要動力驅動形...
2025-10-27 -
吉林火車余煤清掃清車機費用
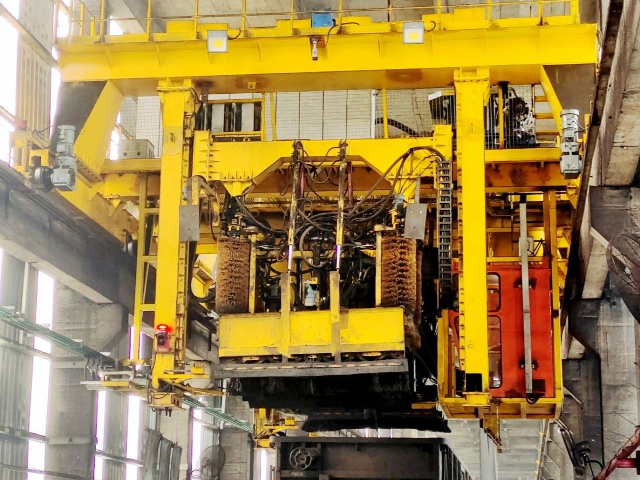
匯博車廂智能清掃機器人(簡稱“清車機器人”)是全國首臺敞篷火車車廂余料清掃智能設備,該機器人集清掃、收集、回收等功能于一體,擁有多項核心專利技術。通過“一鍵啟動”,可自動完成對敞車車廂內底部、四壁及邊沿的整體清掃作業。清掃過程清掃過程安全、環保、智能、高效,不...
2025-10-27 -
 湖北余料清掃清車機直銷
湖北余料清掃清車機直銷廣東匯博機器人技術有限公司,專注于火車車廂余料清掃機器人的研發與生產。我們根據客戶的具體需求,精心設計并提供量身定制的清車機器人解決方案。服務范圍不僅限于產品的交付,更涵蓋設備的現場安裝、精密調試,以及操作與維護培訓,確保客戶團隊能夠熟練操作并有效維護設備,同...
2025-10-27 -
 湖北余料清掃清車機哪家好
湖北余料清掃清車機哪家好2019年9月,匯博機器人通過和濟寧礦業集團物流有限公司開展車廂智能清掃機器人系統項目合作研發,于2020年3月份在2號線安裝調試完畢,車廂智能清掃機器人系統于4月20號正式投入使用;2020年8月濟礦物流公司再次訂購一臺智能清車機器人,并于2020年10月中...
2025-10-27 -
云南凍煤清掃清車機供應商
為了緊密配合多臺翻車機的高效作業節拍,我們創新性地采用了多設備互鎖及聯動策略算法,使得我們的清車機器人產品能夠實現聯動作業。這意味著,在翻車機連續作業的過程中,多臺清車機器人能夠同時啟動,對多個車廂進行并行清潔,從而提升了整體作業效率。根據車廂內余料的實際情況...
2025-10-27 -
 海南自取電光伏智能清潔機器人哪家好
海南自取電光伏智能清潔機器人哪家好運維作業依賴人工是光伏電站運維行業長期面臨的問題。電站巡檢、組件清潔、割草等運維作業嚴重依賴人工,工作效率低下、勞動強度大,且人員安全作業風險高。在一些大型地面電站,人工巡檢需要耗費大量時間和精力,且在復雜地形環境下,巡檢人員的安全難以得到有效保障。光伏電站智...
2025-10-27 -
 四川余煤回收不落地清車機廠家
四川余煤回收不落地清車機廠家設備采用多物料屬性條件下的多參數比較好匹配技術,實現了清掃作業效率與效果的雙重優化。該技術能夠智能識別并適應不同物料(煤、塊礦、鐵精粉、球團等)的特性,自動調整刷盤的工作狀態,包括刷盤角度、轉速及預變形程度,同時精確調控刷盤分布、負壓參數及行進速度等關鍵要素。...
2025-10-27