-
外賣族“三高”風(fēng)險攀升 個性化健康方案受關(guān)注
-
運動常受傷?基因檢測為科學(xué)運動“保駕護(hù)航”
-
聚焦口腔菌群平衡,華壹健康為反復(fù)口腔潰瘍者開“良方”
-
西安華壹健康:以基因檢測技術(shù) 護(hù)航孕期健康新旅程
-
換季就遭罪?華壹健康基因檢測幫你讀懂身體信號
-
護(hù)膚品頻換仍過敏?基因檢測為皮膚健康尋
-
兒童營養(yǎng)補劑別亂買 科學(xué)檢測助家長理性判斷
-
“護(hù)膚屢踩坑?基因檢測為愛美人士解鎖科學(xué)護(hù)膚新路徑
-
關(guān)注小升初成長關(guān)鍵期 華壹健康助力科學(xué)因材施教
-
牙齦出血別硬扛!口腔微生態(tài)檢測+益生菌來護(hù)航
汕尾正規(guī)晶圓運送機械吸臂公司
場景是新技術(shù)應(yīng)用中的重要一環(huán),場景越多意味著應(yīng)用的廣大性和未來的期望空間越大,而如果一款技術(shù)誕生沒有實際的應(yīng)用場景,即無法融入人們的日常生活和生產(chǎn)制造中,這對它的后續(xù)發(fā)展影響是致命的。
機械手臂的應(yīng)用場景有哪些呢?它的應(yīng)用特點十分明顯,主要代替人工從事場景危險的工作或者是代替密集型、重復(fù)性高的動作。如果工作場景符合上述兩個特點,機械手臂都可以得到應(yīng)用。
機械手臂應(yīng)用場景多在制造業(yè),有重工業(yè)屬性,如金屬加工、拋光打磨、裝配、機床上下料、碼垛/搬運、橡膠/塑料、分揀等。 加設(shè)定位裝置和行程檢測機構(gòu)。汕尾正規(guī)晶圓運送機械吸臂公司
建模理論柔性機械臂動力學(xué)方程的建立主要是利用Lagrange方程和NeWton-Euler方程這兩個相當(dāng)有代表性的方程。另外比較常用的還有變分原理,虛位移原理以及Kane方程的方法。而柔性體變形的描述是柔性機械臂系統(tǒng)建模與控制的基礎(chǔ)。因此因首先選擇一定的方式描述柔性體的變形,同時變形的描述與系統(tǒng)動力學(xué)方程的求解關(guān)系密切。[3]柔性體變形的描述主要有以下幾種:1)有限元法;2)有限段法;3)模態(tài)綜合法;4)集中質(zhì)量法;動力學(xué)方程的建立無論是連續(xù)或離散的動力學(xué)模型,其建模方法主要基于兩類基本方法:矢量力學(xué)法和分析力學(xué)法。應(yīng)用較***同時也是比較成熟的是Newton-Euler公式、Lagrange方程、變分原理、虛位移原理和Kane方程。 無錫原裝晶圓運送機械吸臂價格便宜手臂。起著連接和承受外力的作用。

工業(yè)機械臂定義為“其操作機是自動控制的,可重復(fù)編程、多用途,并可以對3個以上軸進(jìn)行編程。它可以是固定式或者移動式。在工業(yè)自動化應(yīng)用中使用”。操作機又定義為“是一種機器,其機構(gòu)通常由一系列相互鉸接或相對滑動的構(gòu)件所組成。它通常有幾個自由度,用以抓取或移動物體(工具或工件)。”所以對工業(yè)機械臂可能理解為:擬人手臂、手腕和手功能 的機械電子裝置;它可把任一物件或工具按空間位姿(位置和姿態(tài))的時變要求進(jìn)行移動,從而完成某一工業(yè)生產(chǎn)的作業(yè)要求。
隨著半導(dǎo)體制造工藝向更小尺寸、更高集成度的方向發(fā)展,對機械吸臂的精度和穩(wěn)定性要求越來越高。在納米級的制造工藝中,吸臂的微小振動、位置偏差或吸附力不均勻都可能對晶圓造成嚴(yán)重影響。因此,如何進(jìn)一步提高吸臂的運動精度和穩(wěn)定性,減少各種誤差因素的影響,是當(dāng)前面臨的一個重要挑戰(zhàn)。半導(dǎo)體制造車間的環(huán)境要求極為嚴(yán)格,需要在超凈、恒溫、恒濕的條件下進(jìn)行生產(chǎn)。機械吸臂在這樣的環(huán)境中運行,需要具備良好的防塵、防靜電、耐腐蝕等性能。同時,為了滿足不同工藝設(shè)備的接口要求和工作空間限制,吸臂的設(shè)計還需要具備更高的靈活性和兼容性。如何在滿足這些復(fù)雜環(huán)境和工藝要求的前提下,保證吸臂的可靠性和使用壽命,也是需要解決的關(guān)鍵問題。簡單的搬運與碼垛,根本無法稱之為智能制造。
晶圓運送機械吸臂的工作原理主要包括以下幾個步驟:
吸附:吸盤通過真空吸附原理將晶圓緊密吸附在其表面,確保晶圓在傳送過程中不會發(fā)生相對位移。
移動:傳動系統(tǒng)驅(qū)動機械臂按照預(yù)定軌跡進(jìn)行移動,將晶圓從一處工藝設(shè)備傳送至另一處。放置:到達(dá)目標(biāo)位置后,吸盤釋放真空,將晶圓放置在指定位置。
返回:完成放置動作后,吸臂返回原點,等待下一次傳送任務(wù)。
在整個工作過程中,控制系統(tǒng)始終監(jiān)測機械臂的運動狀態(tài),確保傳送精度和穩(wěn)定性。同時,為了降低晶圓表面污染的風(fēng)險,晶圓運送機械吸臂還需要配備潔凈室環(huán)境控制系統(tǒng),以維持潔凈室內(nèi)恒定的溫度、濕度和潔凈度。 手臂的結(jié)構(gòu)要緊湊小巧,才能做手臂運動輕快、靈活。汕尾正規(guī)晶圓運送機械吸臂公司
車床行業(yè)機械臂又名車床自動上下料機械手、上下料機械手。汕尾正規(guī)晶圓運送機械吸臂公司
對于晶圓狀態(tài)的檢測,主要包括晶圓的存在檢測、位置偏差檢測和表面質(zhì)量檢測等。通過光電傳感器或電容傳感器可以快速檢測晶圓是否正確放置在吸臂上,以及在搬運過程中是否發(fā)生位移。表面質(zhì)量檢測傳感器則可以實時監(jiān)測晶圓表面是否有劃痕、顆粒污染等缺陷,一旦發(fā)現(xiàn)異常情況,及時發(fā)出警報并采取相應(yīng)措施,以保證晶圓的質(zhì)量不受影響。基于這些豐富的傳感器數(shù)據(jù),控制系統(tǒng)可以對機械吸臂進(jìn)行精確的控制。控制系統(tǒng)采用先進(jìn)的算法和控制器,如PID控制算法、模糊控制算法等,根據(jù)傳感器反饋的信息實時調(diào)整吸臂的運動速度、加速度和力量,確保晶圓在搬運過程中的平穩(wěn)性和準(zhǔn)確性。同時,控制系統(tǒng)還具備與其他半導(dǎo)體制造設(shè)備的通信接口,能夠?qū)崿F(xiàn)協(xié)同工作和自動化生產(chǎn)流程的無縫對接。例如,在晶圓送入光刻機進(jìn)行曝光工藝時,機械吸臂可以與光刻機的控制系統(tǒng)進(jìn)行通信,按照預(yù)定的程序和時間節(jié)點將晶圓準(zhǔn)確地放置在光刻機的工作臺上,并在曝光完成后將晶圓安全取出,整個過程高度自動化且精確無誤。汕尾正規(guī)晶圓運送機械吸臂公司
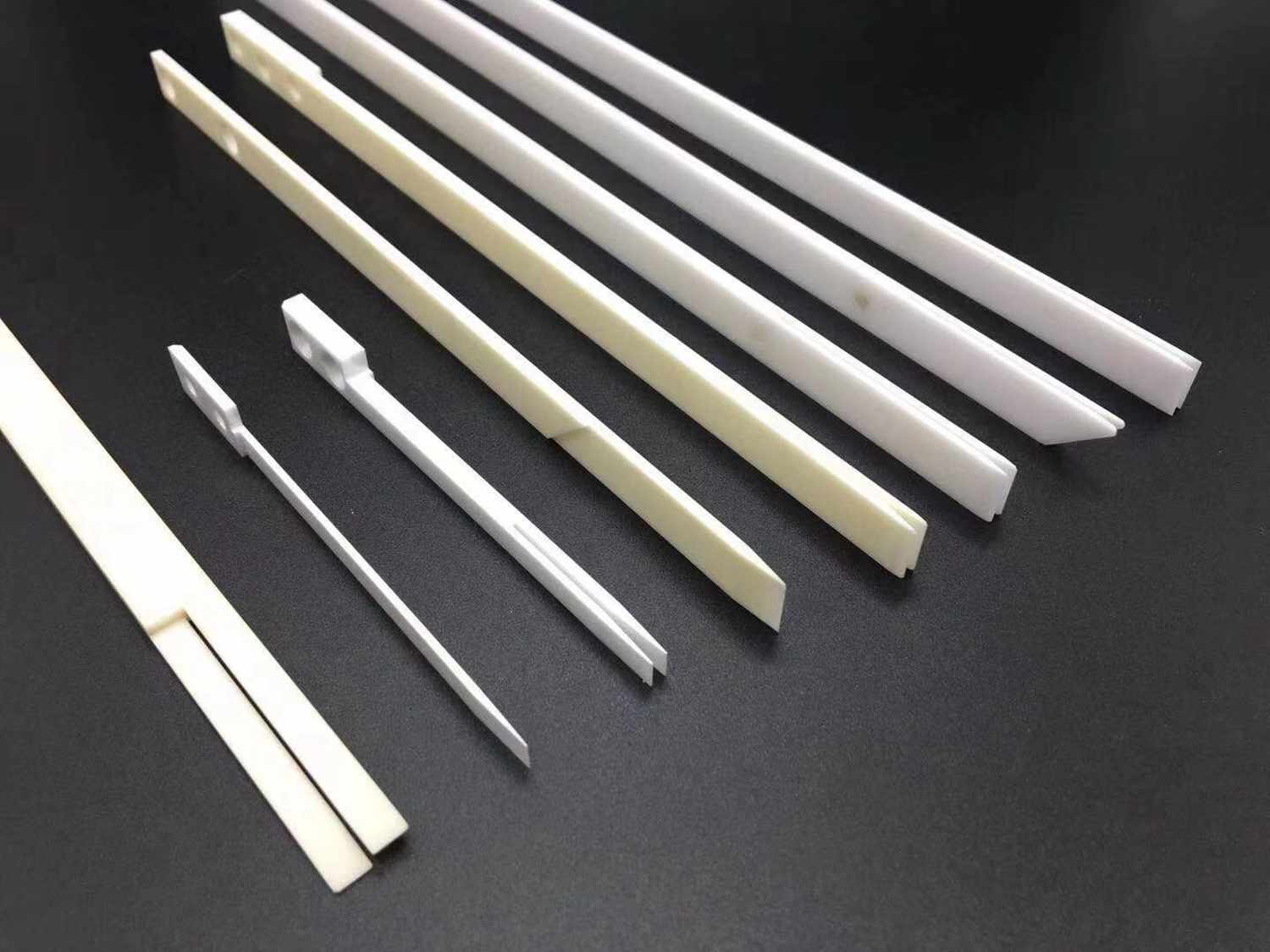
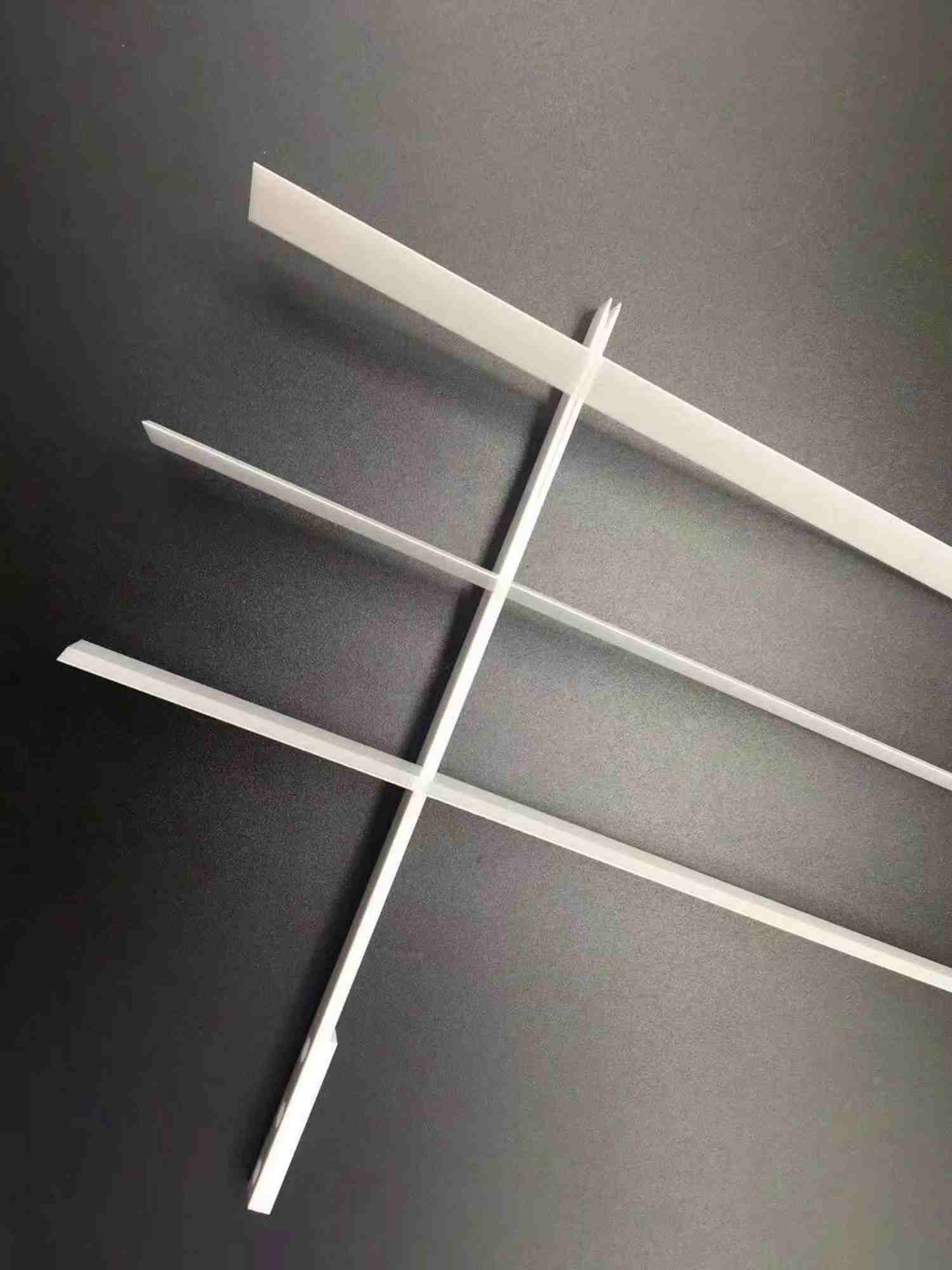
“氧化鋁陶瓷|氧化鋯陶瓷|碳化硅陶瓷|陶瓷機械手”深圳市德澳美精密制造有限公司,公司位于:深圳市龍華區(qū)龍華街道清湖社區(qū)清湖安之龍工業(yè)園B棟201,多年來,德澳美堅持為客戶提供好的服務(wù)。歡迎廣大新老客戶來電,來函,親臨指導(dǎo),洽談業(yè)務(wù)。德澳美期待成為您的長期合作伙伴!
- 茂名進(jìn)口精密結(jié)構(gòu)陶瓷維修電話 2025-12-22
- 上海新款微孔陶瓷真空吸盤生產(chǎn)廠家 2025-12-22
- 常州精密結(jié)構(gòu)陶瓷怎么聯(lián)系 2025-12-22
- 蘇州新款微孔陶瓷真空吸盤價格信息 2025-12-22
- 南通進(jìn)口晶圓運送機械吸臂批發(fā)零售價 2025-12-22
- 蘇州原裝晶圓運送機械吸臂價格優(yōu)惠 2025-12-21
- 浙江微孔陶瓷真空吸盤參考價 2025-12-21
- 江西官方微孔陶瓷真空吸盤廠商 2025-12-21
- 福建正規(guī)晶圓運送機械吸臂廠家報價 2025-12-21
- 清遠(yuǎn)官方晶圓運送機械吸臂價格便宜 2025-12-21
- 連云港葉輪關(guān)風(fēng)機供應(yīng)商 2025-12-22
- 紡織廠傳輸系統(tǒng)服務(wù)價格 2025-12-22
- 南京原裝進(jìn)口保險柜多少錢 2025-12-22
- 江蘇特種激光全息制版系統(tǒng)廠家電話 2025-12-22
- 崇明區(qū)辦公用釹鐵硼操作 2025-12-22
- 廣東電腦屏幕除泡機供應(yīng)商家 2025-12-22
- 小型智能語音助手內(nèi)容 2025-12-22
- 廣東工業(yè)六軸發(fā)展 2025-12-22
- 無錫單孔膜曝氣器商家 2025-12-22
- 南通比較好的光學(xué)鏡頭規(guī)格尺寸 2025-12-22