吉林協作機器人力控設計
安全性在生產過程中至關重要,力控系統在線束裝配中有效提升了作業安全性。線束裝配涉及細小金屬接頭、電線等部件,人工操作時若力度控制不當,可能出現手部劃傷或部件損壞的風險。引入力控系統后,機器人可在設定的安全力值范圍內完成操作,當檢測到超出安全范圍的力值時,會及時調整動作或暫停作業。達寬科技在力控系統設計中融入了多重安全監測機制,通過實時力值反饋和動作調控,降低操作過程中的意外風險,為企業構建更安全的生產環境。機器人力控有助于減少插拔失誤,維持良好合格率,流程更順暢。吉林協作機器人力控設計
機器人力控提升線束裝配效率
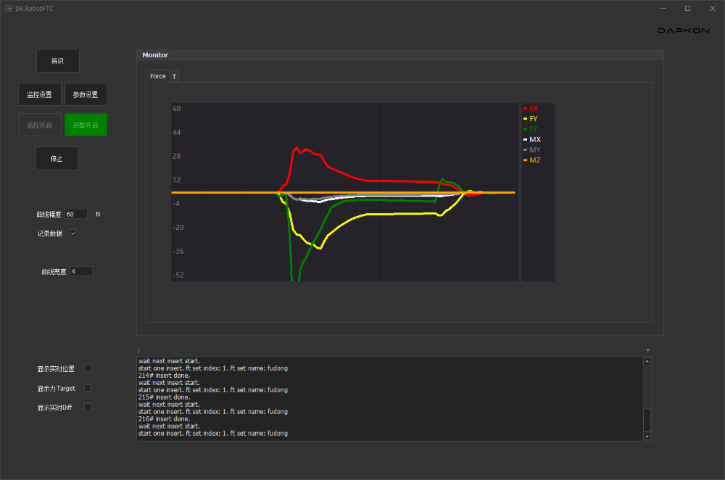
在效率提升方面,力控系統展現出實用價值。傳統人工線束裝配時,操作人員需要反復確認接頭位置、調整插拔力度,遇到復雜線束時還需多次試錯,容易導致作業節奏拖沓。力控系統通過傳感器實時捕捉接觸力數據,指導機器人精細調整動作幅度和力度,減少無效操作。達寬科技針對線束裝配場景優化的力控系統,提升了力值響應的及時性和動作協調性,讓機器人能在連續作業中保持穩定節奏,從而為企業節省操作時間,提升整體裝配效率。 吉林協作機器人力控設計達寬科技機器人力控實現多點同步壓力測試,確保座椅舒適度達標。

機器人力控確保電機裝配質量穩定性
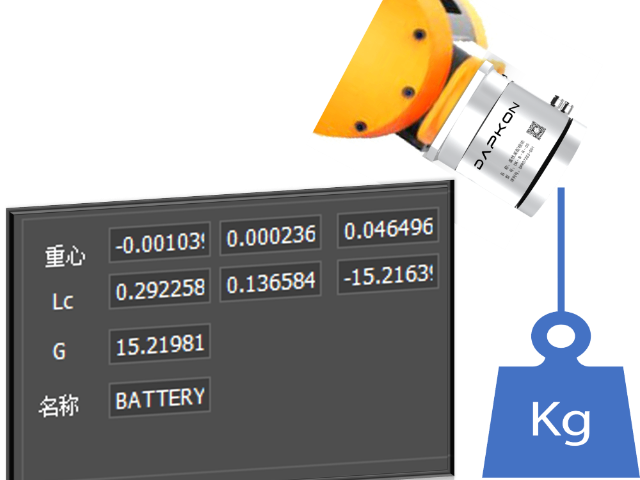
實現電機批量生產的一致性要求是制造業的關鍵課題。機器人力控技術為此構建了堅實基礎。通過程序化設定的力控曲線和閉環反饋機制,確保每個裝配動作施加的軸向壓力保持穩定。達寬科技的機器人力控系統具備優異的力控制重復性。在轉子動平衡校正、繞組端子壓接等關鍵工序中,機器人力控能精確復現預設的裝配力模式。這種穩定性有效降低了因壓力波動導致的漆包線損傷或軸承預緊力偏差,保障了電機產品的運行可靠性和壽命周期。
達寬科技機器人力控:重塑裝配體驗
在電機自動化裝配領域,機器人力控的價值延伸至全流程體驗優化。達寬科技的機器人力控系統,聚焦用戶操作友好性。通過可視化編程界面和模塊化力控參數組,技術人員無需深入掌握復雜力控理論即可快速部署任務。機器人力控系統承擔了關鍵的實時力交互決策,將操作者從繁瑣的力度微調中解放,使其聚焦于工藝優化與產線管理。選擇達寬科技的機器人力控解決方案,意味著獲得一套開箱即用、運行穩定的技術平臺,助力用戶從容應對各類電機裝配挑戰。達寬科技持續致力于推動裝配工藝升級,與用戶共同探索智能制造新高度。 機器人力控連續執行高精度加注任務,減少人工干預需求。
服務器內部存在大量高速連接器和線纜接口,傳統裝配方式容易造成金手指劃傷或插接不到位。機器人力控系統通過微力控制技術,能夠以恰到好處的力度完成各類接口的連接。達寬科技的解決方案針對不同規格的連接器預設了比較好插拔參數,系統會自動識別連接器類型并匹配對應的裝配策略。在內存條安裝、背板連接等關鍵工序中,機器人力控既確保連接可靠,又避免過度用力導致的接口損傷,提升產品可靠性。
達寬科技將機器人力控設計為模塊化方案,兼容主流協作與工業機器人。用戶無需大幅改造現有產線,只需在末端加裝力控模塊并導入服務器裝配工藝包,即可快速投入使用。云端工藝庫定期更新,支持新硬件規格與材料參數,確保系統與時俱進。機器人力控讓機器人成為可靠的裝配助手,助力企業在服務器制造中實現高效、安全與一致的裝配目標 達寬科技機器人力控設定動態壓力上限,異常值觸發即時保護。云南協作機器人力控拋光
達寬科技機器人力控記錄擰緊扭矩曲線,實現工藝參數可追溯。吉林協作機器人力控設計
產品一致性是電機裝配的要求,機器人力控在此發揮關鍵作用。傳統裝配中,機器人缺乏力覺反饋,易出現軸承壓裝過緊導致轉動阻力增大,或過松造成運行晃動的問題,影響電機性能穩定性。達寬科技的機器人力控系統通過預設合理的力值區間,實時監測裝配過程中的力覺變化。在軸承壓裝階段,系統控制機器人輸出均勻力度,確保壓裝深度與緊密度一致。這種穩定的力控能力讓每臺電機的裝配質量保持均衡,降低因個體差異導致的后續檢測返工情況。吉林協作機器人力控設計
- 山西機器人力控裝配零部件 2025-12-22
- 福建自動化裝配流水線 2025-12-21
- 湖北工業力控系統配置 2025-12-21
- 浙江智能柔性力控系統原理 2025-12-21
- 機器人零部件裝配解決方案 2025-12-21
- 遼寧達寬科技力控系統報價 2025-12-21
- 廣東協作機器人裝配接頭 2025-12-21
- 海南工業機器人裝配電機 2025-12-21
- 浙江機器人力控裝配方案 2025-12-21
- 安徽智能裝配流水線 2025-12-21
- 南譙區工廠管理弱電智能化集成施工 2025-12-22
- 微型服務器主板測試-檢修 2025-12-22
- 錢塘區3d激光雷達 2025-12-22
- 滁州品牌網站搭建部署 2025-12-22
- 四川全流程短視頻平臺運營一般多少錢 2025-12-22
- 建鄴區數據定向分析 2025-12-22
- 寶山區挑選Matlab價格 2025-12-22
- 長春加密系統網絡安全法律法規 2025-12-22
- 嘉定區TFT商家 2025-12-22
- 南充自動化智能營銷獲客平臺實踐 2025-12-22