中國臺灣機器人柔性裝配接頭
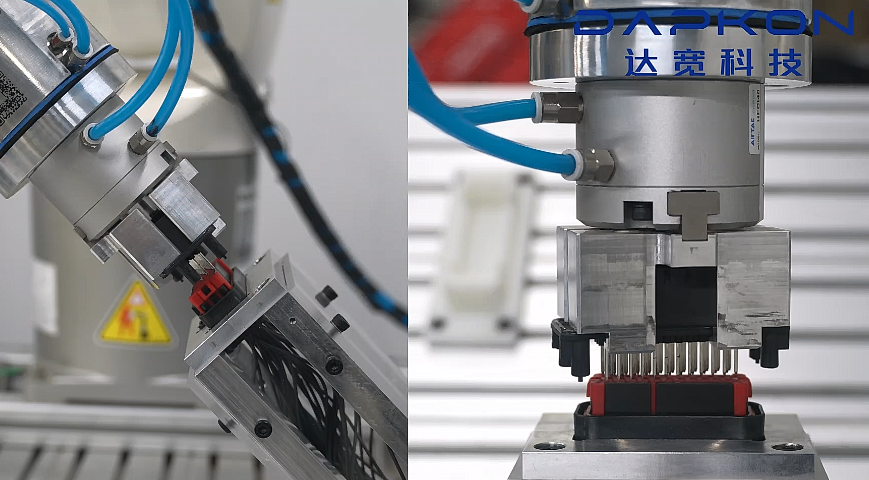
汽車制造常面臨多品種、小批量的線束裝配需求,傳統機器人因重新編程耗時難以適應頻繁換型。達寬科技的力控裝配系統具備參數化快速切換能力,操作人員通過圖形界面預設不同保險絲規格的力控閾值(如插接力、回撤速度),即可實現“一鍵換產”。在插接過程中,機器人憑借實時力反饋減少冗余動作,例如精細識別對接完成點后立即跳轉下一工步,縮短單件作業周期。此外,系統簡化了高密度線束的復雜走線操作,減少人工復核環節,助力企業加快產線節奏并降低對熟練工人的依賴。借助達寬力控,能合理規劃線束裝配流程,提升車間生產效率與空間利用率。中國臺灣機器人柔性裝配接頭
達寬科技力控裝配方案在提升生產效率上效果。齒輪裝配工藝復雜,人工操作時,每一次安裝都需仔細校準,過程緩慢且易因疲勞導致效率起伏。普通機器人若缺乏力控能力,面對不同批次齒輪的微小尺寸差異,只能依靠人工頻繁停機重新編程調試。而力控裝配讓機器人具備自主適應能力,在裝配不同齒輪時,無需人工過多干預,就能依據實時力反饋自動調整動作,持續高效地完成裝配任務。這不僅大幅節省了調整設備所耗費的時間,還使整個生產線的運轉更加連貫,讓企業能在更短時間內完成更多生產訂單,提高生產效率。

行星齒輪裝配的復雜性源于其多齒嚙合結構與嚴苛的軸向對位要求。傳統剛性機器人依賴高精度定位與定制化工裝,面對零件公差或批次差異時需頻繁停機調整,影響生產連續性。達寬科技的力控裝配系統通過六維力傳感器實時監測齒輪接觸面的微觀力變化,賦予機器人動態補償能力。例如行星架與太陽輪嵌套過程中,系統依據阻力曲線自動優化壓裝軌跡,補償位置偏差,無需人工干預即可完成平穩嚙合310。這種自適應特性大幅降低了對精密夾具的依賴,企業更換齒輪型號時需調用預設力控參數庫,省去機械重構時間,縮短換型周期。力控裝配的柔性特點尤其適配多品種小批量生產模式,助力企業靈活響應定制化訂單需求
對于生產行星齒輪相關產品的企業,產品質量穩定性至關重要,而行星齒輪裝配一致性直接影響產品整體性能。人工裝配行星齒輪時,不同操作人員手法習慣有別,易造成裝配精度參差不齊,導致產品質量波動。達寬科技力控裝配方案通過標準化力反饋調節機制解決此問題。每次行星齒輪裝配,該機制確保機器人施加裝配力和齒輪安裝位置處于預設合理范圍。無論生產多少批次行星齒輪,力控裝配都能保障裝配質量穩定,降低人為因素導致的產品差異。企業生產的產品性能更可靠,有助于樹立良好品牌形象,贏得市場認可,為長期穩定發展筑牢基礎。力控裝配提升可追溯性,達寬系統記錄裝配數據,便于管理與后續優化。

達寬科技的力控裝配技術不僅提升了單一產品的裝配質量和效率,更為制造業的生產模式帶來了變革。傳統的裝配生產線通常針對特定產品進行定制化設計,缺乏靈活性,難以適應多品種、小批量的生產需求。而機器人力控裝配系統具有高度的柔性和可編程性,能夠快速適應不同型號曲軸的裝配任務,實現生產線的快速切換和重組。這種柔性生產模式使得企業能夠更加靈活地應對市場變化,快速響應客戶的個性化需求,從而在激烈的市場競爭中占據有利地位。達寬科技力控裝配方案,助力電機齒輪裝配適應多樣需求。能快速切換不同裝配程序,滿足多種齒輪裝配任務。江蘇機器人智能裝配解決方案
達寬力控系統維持生產穩定,機器人穩定作業,確保齒輪裝配流程順暢進行。中國臺灣機器人柔性裝配接頭
在現代工業生產中,軸孔裝配是眾多制造環節的關鍵步驟,而機器人力控技術的引入正為這一環節帶來革新。達寬科技深耕機器人力控領域,其研發的力控裝配方案,能夠讓機器人在軸孔裝配過程中展現出更貼合實際需求的操作能力。傳統的機器人裝配往往依賴固定程序,面對軸孔之間微小的位置偏差或零件公差時,容易出現卡頓甚至損壞零件的情況。而力控裝配通過內置的力傳感器實時捕捉裝配過程中的力反饋,讓機器人能夠根據實際接觸情況靈活調整運動軌跡和力度,如同有經驗的工人在操作時自然做出適應,從而順利完成軸孔的精細對接,為企業的生產流程注入新的活力。中國臺灣機器人柔性裝配接頭
- 福建自動化裝配流水線 2025-12-21
- 浙江智能柔性力控系統原理 2025-12-21
- 遼寧達寬科技力控系統報價 2025-12-21
- 湖北機器人柔性力控系統配置 2025-12-21
- 海南機器人柔性裝配齒輪 2025-12-21
- 中國香港柔性力控裝配流水線 2025-12-21
- 上海機器人力控系統使用方法 2025-12-21
- 北京拋光力控系統優點 2025-12-20
- 上海打磨力控系統廠家 2025-12-20
- 吉林力控裝配線束 2025-12-20
- 金山區短視頻制作大概多少錢 2025-12-21
- 適合學初中物理的軟件 2025-12-21
- 鳳陽工廠管理弱電智能化集成項目 2025-12-21
- 建鄴區科技數據定向分析 2025-12-21
- 南通環保智慧醫療操作 2025-12-21
- 長春超高頻讀寫器廠家 2025-12-21
- 湖北嵌入式液晶屏升降器品牌 2025-12-21
- 有哪些BIM協同平臺哪家便宜 2025-12-21
- 南山區指環式無線掃描槍 2025-12-21
- 陜西短視頻創作華為數字人的教程 2025-12-21