-
 云南無(wú)人機(jī)組合慣導(dǎo)價(jià)格
云南無(wú)人機(jī)組合慣導(dǎo)價(jià)格組合導(dǎo)航設(shè)備的價(jià)格構(gòu)成受多重因素影響,需從技術(shù)實(shí)現(xiàn)和服務(wù)內(nèi)容角度理解其定價(jià)邏輯。傳感器的選型起決定作用,高穩(wěn)定性慣性測(cè)量單元和多頻多系統(tǒng)全球?qū)Ш叫l(wèi)星接收機(jī)的研發(fā)與制造成本較高,直接影響整機(jī)價(jià)格。算法架構(gòu)的復(fù)雜程度同樣重要,深耦合或緊耦合方案需要大量研發(fā)投入,其...
2025-12-10 -
 廣西無(wú)人機(jī)測(cè)距裝置
廣西無(wú)人機(jī)測(cè)距裝置對(duì)于高速旋翼無(wú)人機(jī)或執(zhí)行復(fù)雜機(jī)動(dòng)動(dòng)作的飛行器而言,姿態(tài)控制的實(shí)時(shí)性與準(zhǔn)確性直接決定飛行穩(wěn)定性與任務(wù)質(zhì)量。傳統(tǒng)低頻慣性系統(tǒng)難以滿(mǎn)足快速響應(yīng)需求,易造成控制延遲或振蕩。為此,高動(dòng)態(tài)應(yīng)用場(chǎng)景需依賴(lài)高頻數(shù)據(jù)輸出的高性能IMU。武漢朗維科技有限公司研發(fā)的組合導(dǎo)航設(shè)備搭載...
2025-12-10 -
 中國(guó)澳門(mén)叉車(chē)側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家聯(lián)系方式
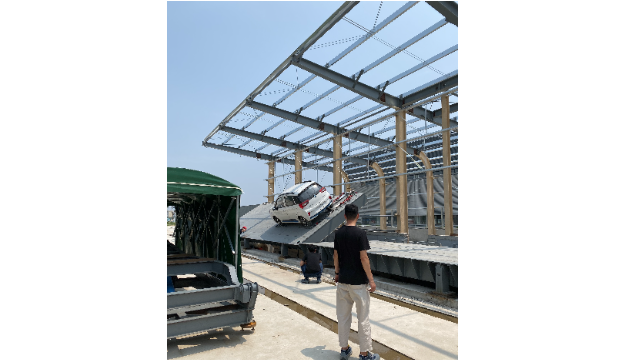
中國(guó)澳門(mén)叉車(chē)側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家聯(lián)系方式武漢朗維的車(chē)輛側(cè)翻試驗(yàn)臺(tái)在設(shè)計(jì)上注重高可靠性與長(zhǎng)壽命保障,有效延長(zhǎng)關(guān)鍵部件使用壽命。主平板采用450×200mm H型鋼焊接框架,結(jié)構(gòu)強(qiáng)度高,可承載60t級(jí)車(chē)輛并短時(shí)過(guò)載10%,抗彎抗扭性能優(yōu)異,長(zhǎng)期使用不變形。液壓舉升油缸缸徑160mm,活塞桿φ95mm,有...
2025-12-10 -
 山西高精度衛(wèi)星定位系統(tǒng)批發(fā)
山西高精度衛(wèi)星定位系統(tǒng)批發(fā)采購(gòu)RTK組合導(dǎo)航系統(tǒng)是一項(xiàng)綜合性決策,需多方面評(píng)估其技術(shù)性能與實(shí)際應(yīng)用匹配度。明確使用場(chǎng)景是基礎(chǔ),例如是否需要在城市密集區(qū)、山區(qū)或林地等信號(hào)不穩(wěn)定環(huán)境中維持高精度定位能力。硬件配置決定系統(tǒng)性能上限,GNSS天線(xiàn)的信號(hào)接收能力、慣性測(cè)量單元的零偏穩(wěn)定性以及中樞...
2025-12-09 -
 貴州多國(guó)標(biāo)兼容非接觸式五輪儀多少錢(qián)
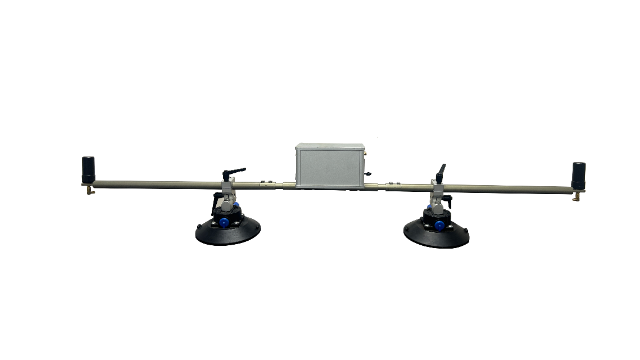
貴州多國(guó)標(biāo)兼容非接觸式五輪儀多少錢(qián)車(chē)輛在彎道行駛時(shí)外側(cè)軌跡的延展范圍,是影響道路安全的關(guān)鍵因素之一,車(chē)身姿態(tài)測(cè)試設(shè)備為此提供了精確的量化手段。通過(guò)記錄車(chē)輛按法規(guī)要求轉(zhuǎn)向狀態(tài)下的運(yùn)動(dòng)軌跡,設(shè)備可精確算出外擺值,以此呈現(xiàn)車(chē)身外點(diǎn)在轉(zhuǎn)彎過(guò)程中達(dá)到的偏移距離峰值。這一參數(shù)對(duì)于大型客車(chē)和貨車(chē)尤為重要,直...
2025-12-09 -
 重慶多國(guó)標(biāo)兼容車(chē)輛性能測(cè)試軟件廠(chǎng)家有哪些
重慶多國(guó)標(biāo)兼容車(chē)輛性能測(cè)試軟件廠(chǎng)家有哪些車(chē)身姿態(tài)測(cè)試設(shè)備的關(guān)鍵功能在于準(zhǔn)確還原車(chē)輛在特定工況下的空間行為,為法規(guī)符合性提供可量化的技術(shù)依據(jù)。系統(tǒng)依據(jù)多項(xiàng)國(guó)家及行業(yè)標(biāo)準(zhǔn)設(shè)計(jì),能夠執(zhí)行車(chē)輛通道圓、外擺值、最小轉(zhuǎn)彎直徑等關(guān)鍵幾何參數(shù)的測(cè)量,滿(mǎn)足GB 1589、GB/T 12540、JT/T 1178.1等...
2025-12-09 -
新疆無(wú)人機(jī)定位軟件批發(fā)
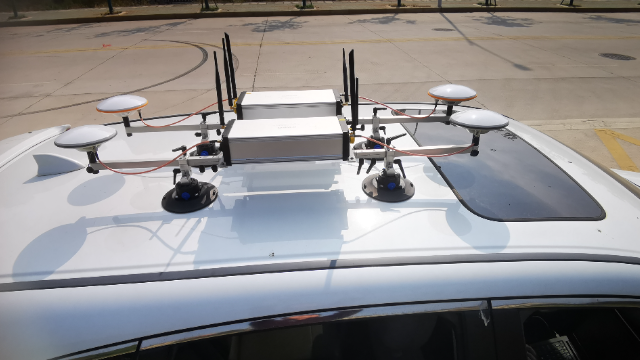
在需要精確航向信息的應(yīng)用場(chǎng)景中,雙天線(xiàn)組合導(dǎo)航技術(shù)具有明顯優(yōu)勢(shì)。傳統(tǒng)單天線(xiàn)系統(tǒng)在車(chē)輛靜止或低速移動(dòng)時(shí)難以準(zhǔn)確確定航向角,而雙天線(xiàn)設(shè)計(jì)通過(guò)測(cè)量?jī)蓚€(gè)全球?qū)Ш叫l(wèi)星系統(tǒng)天線(xiàn)間的載波相位差,結(jié)合基線(xiàn)向量解算,可在靜態(tài)條件下實(shí)現(xiàn)高精度定向。該系統(tǒng)與慣性測(cè)量單元深度融合,不...
2025-12-09 -
 江蘇智能駕駛測(cè)速裝置廠(chǎng)家聯(lián)系方式
江蘇智能駕駛測(cè)速裝置廠(chǎng)家聯(lián)系方式多頻點(diǎn)全球?qū)Ш叫l(wèi)星系統(tǒng)技術(shù)的應(yīng)用明顯提升了組合導(dǎo)航系統(tǒng)的定位性能。系統(tǒng)能夠同步接收多個(gè)頻段的衛(wèi)星信號(hào),利用不同頻率信號(hào)在電離層中傳播速度的差異,建立誤差模型并有效消除電離層延遲,從而提高定位精度。這種多頻觀(guān)測(cè)能力增強(qiáng)了系統(tǒng)對(duì)電磁干擾的抵抗能力,在城市密集區(qū)域或...
2025-12-09 -
 中國(guó)香港國(guó)產(chǎn)RTK定位報(bào)價(jià)
中國(guó)香港國(guó)產(chǎn)RTK定位報(bào)價(jià)智能駕駛系統(tǒng)向高階演進(jìn)過(guò)程中,城市復(fù)雜環(huán)境下的定位連續(xù)性成為關(guān)鍵挑戰(zhàn)。車(chē)輛在立交橋、隧道或高樓密集區(qū)行駛時(shí),GNSS信號(hào)易受遮擋與多路徑效應(yīng)影響,傳統(tǒng)方案常出現(xiàn)跳變或中斷。深耦合組合導(dǎo)航技術(shù)通過(guò)將IMU原始數(shù)據(jù)注入衛(wèi)星信號(hào)跟蹤環(huán)路,提升對(duì)弱信號(hào)的捕獲能力,從觀(guān)...
2025-12-09 -
云南無(wú)人機(jī)定位軟件廠(chǎng)家聯(lián)系方式
組合導(dǎo)航系統(tǒng)的抗干擾能力源于硬件到算法的多層次技術(shù)協(xié)同。在射頻前端,采用高性能天線(xiàn)與低噪聲放大器,提升信號(hào)接收質(zhì)量。自適應(yīng)天線(xiàn)陣列通過(guò)波束成形技術(shù),增強(qiáng)目標(biāo)方向信號(hào)接收,同時(shí)抑制特定方向的干擾源。信號(hào)處理層面集成多域干擾抑制機(jī)制,時(shí)域上檢測(cè)并剔除脈沖干擾,頻域...
2025-12-09 -
 廣東多國(guó)標(biāo)兼容車(chē)輛穩(wěn)態(tài)圓周試驗(yàn)設(shè)備廠(chǎng)家
廣東多國(guó)標(biāo)兼容車(chē)輛穩(wěn)態(tài)圓周試驗(yàn)設(shè)備廠(chǎng)家整車(chē)輕量化設(shè)計(jì)在提升能效與續(xù)航的同時(shí),對(duì)結(jié)構(gòu)性能提出了更高要求,車(chē)身姿態(tài)測(cè)試為此類(lèi)方案的驗(yàn)證提供了數(shù)據(jù)依據(jù)。在減重過(guò)程中,材料替換或結(jié)構(gòu)優(yōu)化可能影響車(chē)身剛度與動(dòng)態(tài)響應(yīng),需通過(guò)實(shí)際測(cè)試評(píng)估其影響。姿態(tài)測(cè)試能夠記錄車(chē)輛在不同載荷和轉(zhuǎn)向工況下的姿態(tài)穩(wěn)定性,幫助工程師...
2025-12-09 -
 天津叉車(chē)側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家
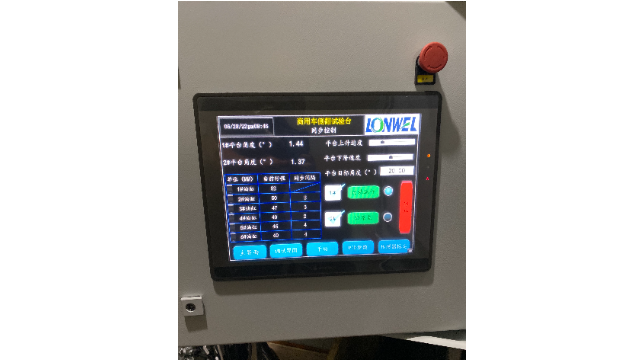
天津叉車(chē)側(cè)翻試驗(yàn)臺(tái)廠(chǎng)家傳統(tǒng)稱(chēng)重系統(tǒng)在輕載工況下常因傳感器量程過(guò)大導(dǎo)致分辨率不足,影響質(zhì)心計(jì)算精度。武漢朗維科技車(chē)輛側(cè)翻試驗(yàn)臺(tái)創(chuàng)新應(yīng)用雙量程自動(dòng)切換技術(shù),每塊稱(chēng)重板集成1t與10t雙量程輪輻式傳感器,系統(tǒng)根據(jù)實(shí)時(shí)載荷智能選擇適配量程輸出數(shù)據(jù),實(shí)現(xiàn)從“能測(cè)”到“測(cè)準(zhǔn)”的跨越。當(dāng)車(chē)輪載荷...
2025-12-09 -
 陜西汽車(chē)外擺值測(cè)量?jī)r(jià)格
陜西汽車(chē)外擺值測(cè)量?jī)r(jià)格轉(zhuǎn)向系統(tǒng)作為載貨汽車(chē)操控的關(guān)鍵,其性能穩(wěn)定性直接關(guān)系到行車(chē)安全,姿態(tài)測(cè)試設(shè)備為此類(lèi)關(guān)鍵部件的評(píng)估提供了技術(shù)手段。系統(tǒng)通過(guò)高精度傳感器采集轉(zhuǎn)向過(guò)程中的操縱力、轉(zhuǎn)角變化及回正特性,完整反映轉(zhuǎn)向機(jī)構(gòu)的工作狀態(tài)。測(cè)試涵蓋空載與滿(mǎn)載工況,模擬城市駕駛、高速巡航及緊急變線(xiàn)...
2025-12-09 -
河北多國(guó)標(biāo)兼容車(chē)輛轉(zhuǎn)向盤(pán)角脈沖試驗(yàn)設(shè)備采購(gòu)
能否在受限環(huán)境中順利通行,直接關(guān)系到車(chē)輛適用性的高低,這一關(guān)鍵指標(biāo)可通過(guò)車(chē)身姿態(tài)測(cè)試設(shè)備,按照標(biāo)準(zhǔn)化流程完成通過(guò)性能評(píng)估來(lái)量化判斷。測(cè)試模擬狹窄彎道、直角轉(zhuǎn)彎及復(fù)雜地形等典型場(chǎng)景,記錄車(chē)輛在極限轉(zhuǎn)向狀態(tài)下的運(yùn)動(dòng)包絡(luò)線(xiàn)。所得數(shù)據(jù)反映車(chē)輛在城市道路、停車(chē)場(chǎng)或特殊作...
2025-12-09 -
 重慶多國(guó)標(biāo)兼容掛車(chē)前后軸軌跡擺幅試驗(yàn)設(shè)備價(jià)格
重慶多國(guó)標(biāo)兼容掛車(chē)前后軸軌跡擺幅試驗(yàn)設(shè)備價(jià)格面對(duì)日益嚴(yán)格的法規(guī)要求,車(chē)身姿態(tài)測(cè)試成為車(chē)企確保產(chǎn)品合規(guī)的重要技術(shù)手段。多項(xiàng)國(guó)家及行業(yè)標(biāo)準(zhǔn)對(duì)車(chē)輛外擺值、最小轉(zhuǎn)彎直徑等參數(shù)設(shè)定了明確限值,這些指標(biāo)直接關(guān)聯(lián)到道路通行安全與操控穩(wěn)定性。通過(guò)使用符合國(guó)家標(biāo)準(zhǔn)的測(cè)試設(shè)備,企業(yè)可在研發(fā)早期驗(yàn)證設(shè)計(jì)方案的合規(guī)性,降低后期...
2025-12-09 -
海南國(guó)產(chǎn)衛(wèi)星定位系統(tǒng)公司
精準(zhǔn)農(nóng)業(yè)領(lǐng)域中,農(nóng)機(jī)自動(dòng)化作業(yè)對(duì)組合導(dǎo)航系統(tǒng)的性能提出了明確要求。厘米級(jí)定位精度是實(shí)現(xiàn)變量施肥、精確播種和自動(dòng)導(dǎo)航的基礎(chǔ),直接影響作業(yè)效率與資源利用率。農(nóng)田環(huán)境復(fù)雜多變,樹(shù)木、作物或地形起伏常導(dǎo)致GNSS信號(hào)遮擋,系統(tǒng)需在信號(hào)不穩(wěn)定條件下保持連續(xù)定位輸出,避免...
2025-12-09 -
 陜西多國(guó)標(biāo)兼容車(chē)輛滑行測(cè)試設(shè)備采購(gòu)
陜西多國(guó)標(biāo)兼容車(chē)輛滑行測(cè)試設(shè)備采購(gòu)車(chē)輛在低速轉(zhuǎn)向時(shí)所需的空間范圍是評(píng)價(jià)其機(jī)動(dòng)性的重要指標(biāo),車(chē)身姿態(tài)測(cè)試設(shè)備通過(guò)精確測(cè)量最小轉(zhuǎn)彎直徑實(shí)現(xiàn)對(duì)此性能的驗(yàn)證。測(cè)試中車(chē)輛以特定轉(zhuǎn)向角進(jìn)行圓周行駛,設(shè)備利用高精度衛(wèi)星定位系統(tǒng)追蹤外側(cè)車(chē)輪的運(yùn)動(dòng)軌跡,計(jì)算出完整的轉(zhuǎn)彎圓直徑。該數(shù)據(jù)不僅用于產(chǎn)品定型和法規(guī)認(rèn)證,...
2025-12-09 -
四川無(wú)人機(jī)GNSS定向品牌
在自動(dòng)駕駛和無(wú)人機(jī)領(lǐng)域,系統(tǒng)的響應(yīng)速度直接關(guān)系到操作的安全性和準(zhǔn)確性。特別是在高速行駛或復(fù)雜飛行環(huán)境中,任何微小的延遲都可能導(dǎo)致嚴(yán)重后果。武漢朗維科技有限公司研發(fā)的組合導(dǎo)航設(shè)備采用深耦合架構(gòu),內(nèi)置高精度IMU,INS解算延遲控制在毫秒級(jí),明顯提升系統(tǒng)的動(dòng)態(tài)性能...
2025-12-09 -
 新疆多國(guó)標(biāo)兼容車(chē)輛外擺值測(cè)量試驗(yàn)設(shè)備采購(gòu)
新疆多國(guó)標(biāo)兼容車(chē)輛外擺值測(cè)量試驗(yàn)設(shè)備采購(gòu)近年來(lái)國(guó)內(nèi)企業(yè)快速發(fā)展,依托本地化服務(wù)和成本優(yōu)勢(shì),推出了一系列具備競(jìng)爭(zhēng)力的產(chǎn)品。模塊化設(shè)計(jì)成為趨勢(shì),用戶(hù)可根據(jù)實(shí)際需要逐步擴(kuò)展功能單元。智能化功能如自動(dòng)數(shù)據(jù)上傳、遠(yuǎn)程診斷和報(bào)告生成也被部分廠(chǎng)商集成到系統(tǒng)中。還有企業(yè)深耕特定測(cè)試領(lǐng)域,例如轉(zhuǎn)向幾何或懸掛動(dòng)態(tài)響應(yīng),...
2025-12-09 -
湖北農(nóng)機(jī)GNSS定位品牌
無(wú)人機(jī)平臺(tái)對(duì)導(dǎo)航系統(tǒng)的重量、功耗和精度有嚴(yán)格要求,因此廠(chǎng)家選擇直接影響飛行性能與任務(wù)執(zhí)行能力。技術(shù)實(shí)力是關(guān)鍵考量,具備自主算法研發(fā)和關(guān)鍵部件設(shè)計(jì)能力的廠(chǎng)商更能保障系統(tǒng)性能的持續(xù)優(yōu)化。產(chǎn)品線(xiàn)的廣度反映廠(chǎng)家的工程經(jīng)驗(yàn),能夠?yàn)槎嘈怼⒐潭ㄒ淼炔煌瑯?gòu)型無(wú)人機(jī)提供適配方...
2025-12-09 -
新疆車(chē)輛轉(zhuǎn)向盤(pán)中心區(qū)試驗(yàn)設(shè)備廠(chǎng)家有哪些
車(chē)輛制造企業(yè)面臨多標(biāo)準(zhǔn)并行的檢測(cè)要求,武漢朗維科技有限公司的車(chē)身姿態(tài)測(cè)試系統(tǒng)的多標(biāo)準(zhǔn)兼容能力為此提供了高效解決方案。該系統(tǒng)集成了對(duì)GB 1589-2016、GB/T12540-2009、JT/T 1178.1-2018等多項(xiàng)技術(shù)規(guī)范的支持,無(wú)需更換設(shè)備或重復(fù)搭...
2025-12-09 -
 浙江高精度測(cè)距裝置批發(fā)
浙江高精度測(cè)距裝置批發(fā)自動(dòng)駕駛技術(shù)的發(fā)展對(duì)定位能力提出了更高要求,組合導(dǎo)航系統(tǒng)因其在精度與連續(xù)性方面的優(yōu)勢(shì),成為實(shí)現(xiàn)高階智能駕駛的關(guān)鍵組件。系統(tǒng)集成高精度測(cè)量與導(dǎo)航雙引擎,支持實(shí)時(shí)動(dòng)態(tài)差分解算、抗干擾處理及雙天線(xiàn)定向功能,可在復(fù)雜城市環(huán)境中提供厘米級(jí)定位服務(wù)。通過(guò)融合高性能慣性測(cè)量...
2025-12-09 -
 安徽叉車(chē)側(cè)翻試驗(yàn)臺(tái)報(bào)價(jià)
安徽叉車(chē)側(cè)翻試驗(yàn)臺(tái)報(bào)價(jià)高校與科研單位利用車(chē)輛側(cè)翻試驗(yàn)臺(tái)開(kāi)展車(chē)輛動(dòng)力學(xué)基礎(chǔ)研究,探索穩(wěn)定性控制的新方法。研究人員借助該設(shè)備驗(yàn)證理論模型的準(zhǔn)確性,分析不同設(shè)計(jì)變量對(duì)側(cè)翻閾值的影響規(guī)律。武漢朗維科技有限公司深耕汽車(chē)測(cè)試系統(tǒng)研發(fā)領(lǐng)域,其設(shè)備通過(guò)ISO 9001認(rèn)證的質(zhì)量管理體系,為高精度傳...
2025-12-09 -
湖南農(nóng)機(jī)GNSS定位生產(chǎn)廠(chǎng)家
不同應(yīng)用場(chǎng)景對(duì)導(dǎo)航系統(tǒng)的技術(shù)實(shí)現(xiàn)方式提出了差異化要求,促使組合導(dǎo)航在架構(gòu)設(shè)計(jì)上呈現(xiàn)出多層次的發(fā)展路徑。松耦合方案將全球?qū)Ш叫l(wèi)星系統(tǒng)和慣性導(dǎo)航分別單獨(dú)運(yùn)行,只在輸出階段對(duì)定位結(jié)果進(jìn)行融合,結(jié)構(gòu)簡(jiǎn)單但對(duì)誤差的抑制能力有限。緊耦合則深入到原始觀(guān)測(cè)值層面,利用偽距、多...
2025-12-09 -
云南叉車(chē)側(cè)翻試驗(yàn)臺(tái)多少錢(qián)一臺(tái)
車(chē)輛側(cè)翻試驗(yàn)臺(tái)的市場(chǎng)報(bào)價(jià)并非固定數(shù)值,而是根據(jù)具體技術(shù)要求和配置水平呈現(xiàn)明顯差異。基礎(chǔ)功能型設(shè)備通常具備標(biāo)準(zhǔn)尺寸平臺(tái)與常規(guī)傾角范圍,其投入成本相對(duì)可控,適合預(yù)算有限且測(cè)試需求明確的用戶(hù)。而針對(duì)重型商用車(chē)或新能源車(chē)型的高承載型號(hào),因結(jié)構(gòu)強(qiáng)度、驅(qū)動(dòng)功率及安全冗余設(shè)...
2025-12-09 -
貴州雙天線(xiàn)RTK定位采購(gòu)
這些年,國(guó)內(nèi)組合導(dǎo)航品牌在技術(shù)研發(fā)和市場(chǎng)拓展方面取得明顯進(jìn)展,逐步在多個(gè)領(lǐng)域形成競(jìng)爭(zhēng)優(yōu)勢(shì)。依托對(duì)本地應(yīng)用場(chǎng)景的深入理解,這些企業(yè)能夠開(kāi)發(fā)出更貼合實(shí)際工況的解決方案,尤其在智能交通、精準(zhǔn)農(nóng)業(yè)和工程機(jī)械領(lǐng)域表現(xiàn)突出。產(chǎn)品體系覆蓋廣,從滿(mǎn)足基本定位需求的通用模塊到面...
2025-12-09 -
山西智能駕駛衛(wèi)星定位系統(tǒng)生產(chǎn)廠(chǎng)家
無(wú)人機(jī)在執(zhí)行測(cè)繪、電力巡線(xiàn)或農(nóng)田噴灑任務(wù)時(shí),其作業(yè)質(zhì)量高度依賴(lài)導(dǎo)航系統(tǒng)的穩(wěn)定輸出。組合導(dǎo)航技術(shù)通過(guò)整合高精度全球?qū)Ш叫l(wèi)星系統(tǒng)接收機(jī)與高性能慣性測(cè)量單元,構(gòu)建出適應(yīng)多變空域環(huán)境的定位能力。在信號(hào)良好的空域,衛(wèi)星數(shù)據(jù)提供精確的位置參考,而在樓宇密集區(qū)、峽谷或林冠上...
2025-12-09 -
甘肅高精度GNSS定位廠(chǎng)家聯(lián)系方式
慣性傳感器的輸出易受溫度變化影響,全溫標(biāo)定技術(shù)為此提供了有效的校正手段。加速度計(jì)和陀螺儀的零偏與比例因子會(huì)隨溫度波動(dòng)而發(fā)生變化,導(dǎo)致測(cè)量誤差累積,影響定位精度。全溫標(biāo)定通過(guò)在受控環(huán)境下對(duì)設(shè)備進(jìn)行寬溫度范圍的系統(tǒng)性測(cè)試,采集不同溫度點(diǎn)下的誤差數(shù)據(jù),建立精確的溫度...
2025-12-08 -
湖北無(wú)人機(jī)測(cè)速裝置報(bào)價(jià)
在城市高樓林立或地下隧道等衛(wèi)星信號(hào)難以覆蓋的區(qū)域,定位系統(tǒng)面臨連續(xù)性挑戰(zhàn),組合導(dǎo)航通過(guò)融合全球?qū)Ш叫l(wèi)星系統(tǒng)、慣性測(cè)量單元與里程計(jì)等多源傳感器數(shù)據(jù),提供有效解決方案。全球?qū)Ш叫l(wèi)星系統(tǒng)提供長(zhǎng)期穩(wěn)定的精確定位參考,慣性測(cè)量單元在信號(hào)中斷期間基于前一時(shí)刻的狀態(tài)推算載體...
2025-12-08 -
安徽數(shù)字化施工定位軟件批發(fā)
無(wú)人機(jī)平臺(tái)對(duì)導(dǎo)航系統(tǒng)的重量、功耗和精度有嚴(yán)格要求,因此廠(chǎng)家選擇直接影響飛行性能與任務(wù)執(zhí)行能力。技術(shù)實(shí)力是關(guān)鍵考量,具備自主算法研發(fā)和關(guān)鍵部件設(shè)計(jì)能力的廠(chǎng)商更能保障系統(tǒng)性能的持續(xù)優(yōu)化。產(chǎn)品線(xiàn)的廣度反映廠(chǎng)家的工程經(jīng)驗(yàn),能夠?yàn)槎嘈怼⒐潭ㄒ淼炔煌瑯?gòu)型無(wú)人機(jī)提供適配方...
2025-12-08