北京自動駕駛仿真驗證用什么軟件好
汽車軟件測試仿真驗證貫穿軟件開發的整個過程,通過模型在環(MIL)、軟件在環(SIL)、硬件在環(HIL)這三個不同層級的測試,一步步驗證控制算法和軟件邏輯的有效性。MIL測試階段主要關注算法邏輯對不對,通過搭建控制模型和虛擬運行環境,測試軟件在理想條件下能不能實現預期功能。到了SIL測試階段,會把生成的目標代碼放到仿真環境里運行,檢查代碼的執行效率和邏輯是否和模型一致,找出內存泄漏等潛在問題。針對自動駕駛軟件,仿真驗證還要覆蓋多傳感器融合、路徑規劃等關鍵模塊,通過大量的虛擬場景測試軟件的抗干擾能力和穩定性。這種分層次的驗證方式能在軟件開發的早期就發現問題,不用等到后期實車測試才暴露,降低了實車測試的成本和風險,確保汽車軟件既能滿足功能安全標準,又能達到實際使用中的性能要求。電機控制模擬仿真實施方案需明確建模標準與測試工況,保障仿真過程規范有序。北京自動駕駛仿真驗證用什么軟件好

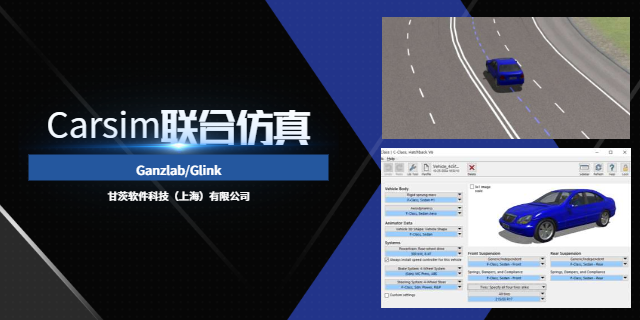
自動駕駛汽車仿真測試軟件需構建覆蓋感知、決策、控制全鏈路的虛擬測試環境。軟件應能生成多樣化場景庫,包含不同路況、天氣與交通參與者,支持激光雷達、攝像頭等傳感器的仿真,模擬其在復雜環境下的信號特性(如噪聲、畸變、不同光照下的圖像效果)。決策層測試需支持路徑規劃、行為預測算法的驗證,分析不同場景下的決策安全性;控制層則需結合車輛動力學模型,測試轉向、制動指令的執行效果。軟件還應具備場景回放與數據分析功能,量化算法的性能指標,為自動駕駛系統(尤其是L2+級輔助駕駛)的迭代優化提供可靠依據。北京自動駕駛仿真驗證用什么軟件好整車動力性能仿真軟件的準確性,可從動力響應模擬與實車數據吻合度來判斷。
底盤控制仿真驗證主要是通過虛擬測試的方式,檢驗制動、轉向、懸架這三大系統控制策略的實際效果,整個過程需要搭建底盤部件與控制算法之間的閉環仿真模型。制動系統的驗證要模擬濕滑路面剎車、突發情況避讓等場景,看ABS/ESP系統的反應速度,計算車輛制動距離和車身姿態的變化,判斷制動力分配是否合理,會不會影響制動時的穩定性。轉向系統的驗證要盯著助力特性、傳動比這些參數對駕駛操控的影響,研究怎么改善轉向遲滯的問題,同時評估不同車速下轉向的輕重程度和路感反饋是否符合駕駛習慣。懸架系統的驗證則要模擬車輛經過鋪裝路、碎石路、減速帶等不同路面時的情況,看阻尼調節能不能有效抑制車身震動,提升乘坐舒適性,還要找到懸架剛度和車輛操控穩定性之間的平衡點。驗證時必須考慮極端溫度、車輛載荷變化等各種邊界條件,確保底盤控制策略在任何使用場景下都能穩定可靠。
整車操縱穩定性仿真驗證項目報價依據仿真精度、工況數量及交付成果而定。基礎報價涵蓋標準工況仿真,如蛇形試驗、穩態回轉測試、轉向回正性試驗,基于通用車輛參數庫建模,輸出橫擺角速度、側傾角、轉向力等基礎指標,包含多種典型載荷狀態的仿真結果;高階報價包含個性化工況定制,如極限側滑工況、不同載荷分布下的操縱性分析、惡劣天氣路面的行駛穩定性測試,需構建高精度多體動力學模型,結合實車測試數據校準參數,包含各種工況的對比分析。報價還涉及報告交付形式,只提供數據清單的基礎服務價格較低,包含仿真動畫、優化方案及工程師解讀的增值服務價格相應上浮,整體費用需根據項目復雜度階梯式核算。汽車控制器應用層軟件開發服務商,需具備控制邏輯轉化與仿真驗證的綜合能力。
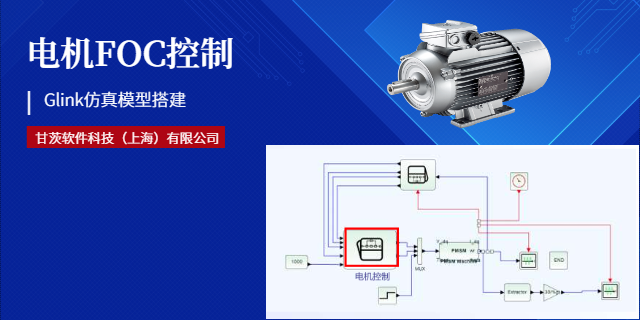
電機控制汽車模擬仿真實施方案需規劃從模型搭建到性能驗證的完整流程。方案初期需采集電機參數(如額定功率、繞組電阻、電感),搭建FOC控制模型,確定電流環、速度環的控制結構與初始參數。仿真階段需設置多種工況(如怠速、急加速、額定負載、減速回收),測試電機的動態響應(如扭矩跟隨性、轉速穩定性),分析弱磁控制區域的性能表現。同時,開展效率優化仿真,確定不同工況下的優化控制參數。方案還需包含模型與實車測試的對標環節,通過數據校準提升模型精度,確保仿真結果能指導實際電機控制器開發。汽車仿真與實車測試誤差多來自模型或參數偏差,通過優化可縮小兩者差距。北京自動駕駛仿真驗證用什么軟件好
自動駕駛汽車仿真實施方案應明確測試場景覆蓋范圍、評價指標,確保驗證過程科學有序。北京自動駕駛仿真驗證用什么軟件好
汽車動力性仿真工具的準確性取決于動力系統模型精度與行駛阻力模擬的真實性。準確的工具需能搭建包含發動機/電機、變速箱、傳動系統的完整動力模型,準確輸入動力部件的特性參數,如發動機外特性曲線、電機扭矩特性、變速箱速比。在行駛阻力模擬方面,需考慮空氣阻力、滾動阻力、坡度阻力的精確計算,反映不同車速、路況下的阻力變化。工具應能仿真0-100km/h加速時間、最高車速、最大爬坡度等動力性指標,且仿真結果需與實車測試具有良好的一致性。同時支持參數敏感性分析,通過調整動力部件參數評估對動力性能的影響,為動力系統選型與參數優化提供準確參考。北京自動駕駛仿真驗證用什么軟件好
- 銀川自動駕駛汽車模擬仿真與實車測試誤差大嗎 2025-12-23
- 長春基于模型設計 2025-12-23
- 河北智能MBD什么品牌好 2025-12-23
- 青海新能源汽車仿真驗證外包服務 2025-12-23
- 北京汽車電子控制系統控制器算法有哪些開發公司 2025-12-23
- 河北需求分析基于模型設計服務價格 2025-12-23
- 山東底盤控制汽車仿真服務內容 2025-12-23
- 浙江新能源控制器算法的作用 2025-12-23
- 天津低成本科學計算品牌 2025-12-22
- 江西汽車發動機科學分析什么軟件好用 2025-12-22
- 浙江官方授權經銷Agilia再轉印打印機生產商 2025-12-23
- 準格爾旗現代數字化轉型影響 2025-12-23
- 甘肅吊裝工藝模擬數字孿生哪家好 2025-12-23
- 天津打印紙有幾種 2025-12-23
- 浙江PCBA的全自動功能測試一體化 2025-12-23
- 射洪進口工業組態網關 2025-12-23
- 吉林KC認證哪家性價比高 2025-12-23
- 北京推進**智能撰寫 2025-12-23
- 達拉特旗高速內存抖音代運營 2025-12-23
- 芯片堆疊封裝 2025-12-23